Tire (Friction Parameterized)
Tire with friction parameterized in terms of static and kinetic coefficients

Libraries:
Simscape /
Driveline /
Tires & Vehicles
Description
The Tire (Friction Parameterized) block represents a tire with friction parameterized in terms of static and kinetic coefficients. The static friction coefficient, μs, determines the applied torque at which the tire loses traction and begins to slip. The kinetic friction coefficient, μk, determines the amount of torque that the tire transmits to the pavement once it begins to slip. The tire regains traction when its relative velocity over the pavement falls below the specified traction velocity tolerance.
To increase the fidelity of the tire model, specify properties such as tire compliance, inertia, and rolling resistance. Note that these properties increase the complexity of the tire model and can slow down simulation. Consider ignoring tire compliance and inertia if simulating the model in real time or when preparing the model for hardware-in-the-loop (HIL) simulation.
Wheel Slip
When you set Slip output type to Relative,
the block outputs the relative slip velocity as a unitless physical signal at port
S, such that
where:
Vx is the wheel hub longitudinal velocity at port H.
rw is the rolling radius.
Ω is the wheel axle angular velocity at port A.
When you set Slip output type to
Absolute, port S outputs the
absolute contact point slip velocity in a rotational form such that
where u is the time-rate of change in longitudinal deformation and u/rw is equivalent to the rotational velocity of the spring and damper in the logged simulation results.
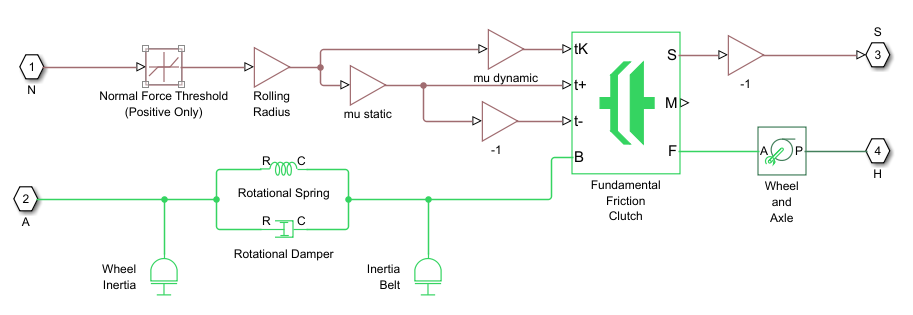
When you set Slip output type to Absolute,
the block uses the friction model of the Fundamental Friction Clutch block. The figure demonstrates how the
block implements slip:
When you set Compliance to No
compliance - Suitable for HIL simulation, the block sets .
Examples

Vehicle with Four-Wheel Drive
A four-wheel drive vehicle starting from rest and ascending a 15 degree incline. Initially the vehicle rolls backward until the engine develops sufficient torque to counter the slope. The tire compliance dynamics can be seen as the vehicle starts to accelerate. The model variant chosen for all of the tires can be set to the Simple, Friction Parameterized, or Magic Formula tire model using the hyperlinks in the model.