tsa
Time-synchronous signal average
Syntax
Description
ta = tsa(___,Name=Value)
tsa(___) with no output arguments plots the
time-synchronous average signal and the time-domain signals corresponding to
each signal segment in the current figure.
Examples
Compute the time-synchronous average of a noisy sinusoid.
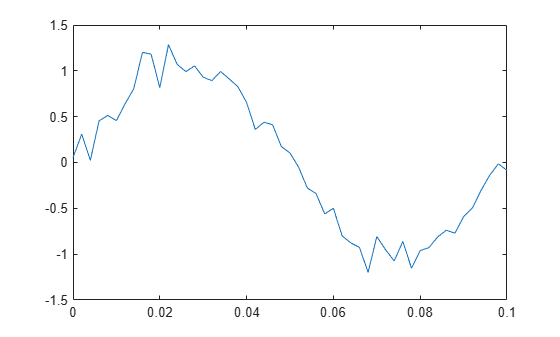
Generate a signal consisting of a sinusoid embedded in white Gaussian noise. The signal is sampled at 500 Hz for 20 seconds. Specify a sinusoid frequency of 10 Hz and a noise variance of 0.01. Plot one period of the signal.
fs = 500; t = 0:1/fs:20-1/fs; f0 = 10; y = sin(2*pi*f0*t) + randn(size(t))/10; plot(t,y) xlim([0 1/f0])
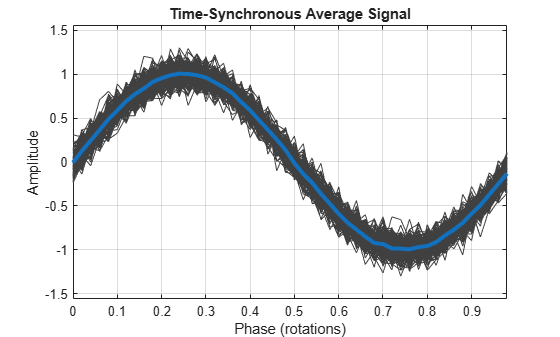
Compute the time-synchronous average of the signal. For the synchronizing signal, use a set of pulses with the same period as the sinusoid. Use tsa without output arguments to display the result.
tPulse = 0:1/f0:max(t); tsa(y,fs,tPulse)
Generate a signal that consists of an exponentially damped quadratic chirp. The signal is sampled at 1 kHz for 2 seconds. The chirp has an initial frequency of 2 Hz that increases to 28 Hz after the first second. The damping has a characteristic time of 1/2 second. Plot the signal.
fs = 1e3;
t = 0:1/fs:2;
x = exp(-2*t').*chirp(t',2,1,28,'quadratic');
plot(t,x)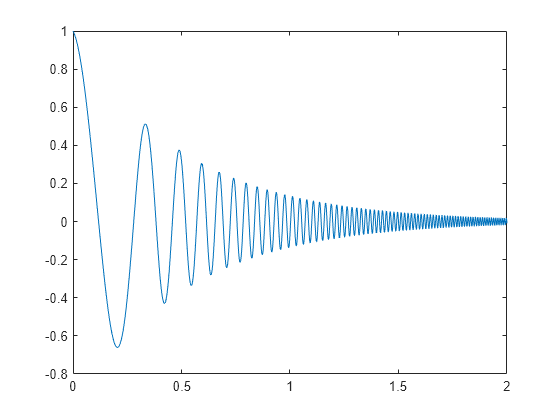
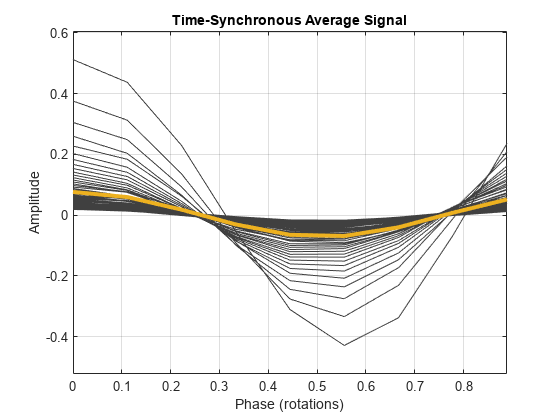
Create a duration array using the time vector. Construct a timetable with the duration array and the signal. Determine the pulse times using the locations of the signal peaks. Display the time-synchronous average.
ts = seconds(t)'; tx = timetable(ts,x); [~,lc] = findpeaks(x,t); tsa(tx,lc)
Compute the time-synchronous average. View the types of the output arguments. The sample times are stored in a duration array.
[xta,xt,xp,xrpm] = tsa(tx,lc);
whos x*Name Size Bytes Class Attributes x 2001x1 16008 double xp 9x1 1091 timetable xrpm 1x1 8 double xt 9x1 88 duration xta 9x1 1087 timetable
Convert the duration array to a datetime vector. Construct a timetable using the datetime vector and the signal. Compute the time-synchronous average, but now average over sets of 15 rotations.
View the types of the output arguments. The sample times are again stored in a duration array, even though the input timetable used a datetime vector.
dtb = datetime(datevec(ts));
dtt = timetable(dtb,x);
nr = 15;
tsa(dtt,lc,'NumRotations',nr)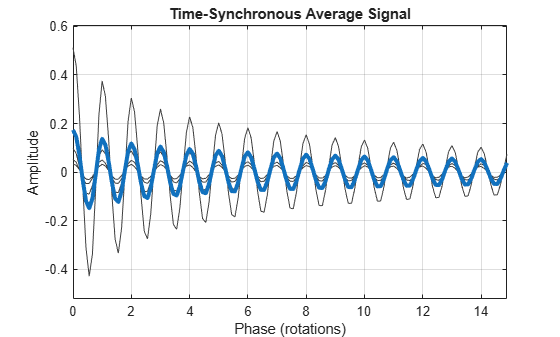
[dta,dt,dp,drpm] = tsa(dtt,lc,'NumRotations',nr); whos d*
Name Size Bytes Class Attributes dp 135x1 3107 timetable drpm 1x1 8 double dt 135x1 1096 duration dta 135x1 3103 timetable dtb 2001x1 32016 datetime dtt 2001x1 48945 timetable
Compute the time-synchronous average of the position of a fan blade as it slows down after switchoff.
A desk fan spinning at 2400 rpm is turned off. Air resistance (with a negligible contribution from bearing friction) causes the fan rotor to stop in approximately 5 seconds. A high-speed camera measures the x-coordinate of one of the fan blades at a rate of 1 kHz.
fs = 1000; t = 0:1/fs:5-1/fs; rpm0 = 2400;
Idealize the fan blade as a point mass circling the rotor center at a radius of 10 cm. The blade experiences a drag force proportional to speed, resulting in the following expression for the phase angle:
where is the initial frequency and second is the decay time.
a = 0.1; f0 = rpm0/60; T = 0.75; phi = 2*pi*f0*T*(1-exp(-t/T));
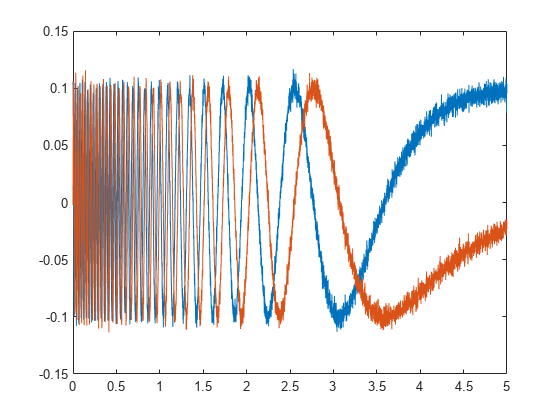
Compute and plot the x- and y-coordinates. Add white Gaussian noise.
x = a*cos(phi) + randn(size(phi))/200; y = a*sin(phi) + randn(size(phi))/200; plot(t,x,t,y)
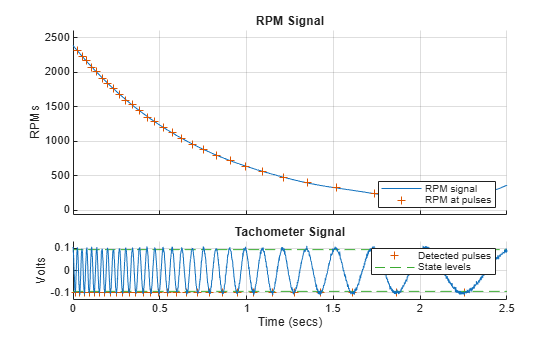
Determine the synchronizing signal. Use the tachorpm function to find the pulse times. Limit the search to times before 2.5 seconds. Plot the rotational speed to see its exponential decay.
[rpm,~,tp] = tachorpm(x(t<2.5),fs); tachorpm(x(t<2.5),fs)
Compute and plot the time-synchronous average signal, which corresponds to a period of a sinusoid. Perform the averaging in the frequency domain.
clf
tsa(x,fs,tp,Method="fft")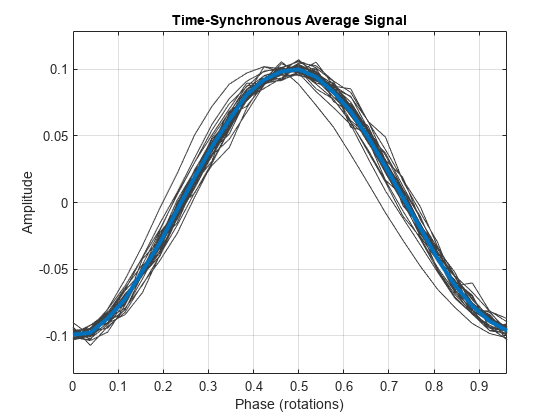
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
Given an input signal, a sample rate, and a set of tachometer pulses,
tsa performs these steps:
Determines cycle start and end times based on the tachometer pulses and the value specified for
PulsesPerRotation.Resamples the input signal based on the value specified for
'ResampleFactor'.Averages the resampled signal based on the option specified for
'Method'.If
Methodis set to"fft", the function:Breaks the signal into segments corresponding to the different cycles.
Computes the discrete Fourier transform of each segment.
Truncates the longer transforms so all transforms have the same length.
Averages the spectra.
Computes the inverse discrete Fourier transform of the average to convert it to the time domain.
If
Methodis set to one of the time-domain methods, the function:Using the specified method, interpolates the signal onto grids of equally spaced samples corresponding to the different cycles.
Concatenates the resampled signal segments based on the value specified for
NumRotations.Computes the average of all the segments.
References
[1] Bechhoefer, Eric, and Michael Kingsley. "A Review of Time-Synchronous Average Algorithms." Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, September-October, 2009.
Extended Capabilities
Version History
Introduced in R2017b