Ideal Rotational Motion Sensor
机械旋转系统中的运动传感器

库:
Simscape /
Foundation Library /
Mechanical /
Mechanical Sensors
描述
Ideal Rotational Motion Sensor 模块表示理想的机械旋转运动传感器,即一种用于将在两个机械旋转节点之间测得的势变量转换为与加速度、角速度或位置(角度)成比例的控制信号的器件。您可以将初始角位置(偏移量)指定为模块参数。
这是一种理想的传感器,因为它不考虑惯性、摩擦、延迟和能耗等因素。
连接端 R 和 C 是机械旋转守恒端口,用于将模块连接到被监控运动的节点。此模块的正方向是从端口 R 到端口 C。这意味着速度按照 ω = ωR – ωC 进行测量,其中 ωR 和 ωC 分别是端口 R 和端口 C 处的绝对角速度。使用测量参考参数,您可以禁用端口 C 并相对于接地值进行测量。
连接端 α、W 和 A 分别是角加速度、速度和位移的物理信号输出端口。这些端口的可见性由模块参数控制。如果您启用端口 α,模块将执行额外的计算,以根据速度测量加速度。为了避免不必要的模型复杂性,建议在模块的每个实例中仅启用实际用于测量的端口。
包角为 [0, 2*pi] 复选框可用于控制角位移输出范围。在选中该复选框后,无论目标的旋转圈数和旋转方向如何,角位移都将保持在 0 到 2π 弧度(360 度)的范围内。在清除此复选框时,输出范围不受限制。
下图展示了两个选项之间的差异。
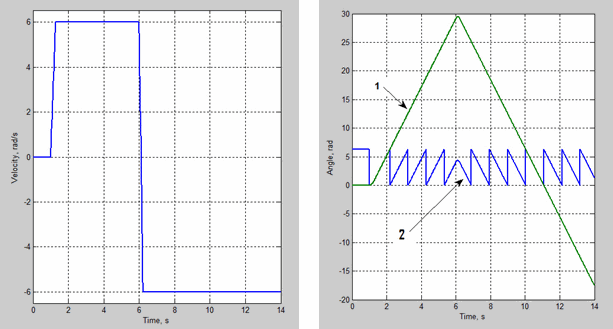
在此示例中,目标在前 5 秒内以 6 弧度/秒的速度沿正方向移动,然后改为以相同的速度沿负方向移动。默认的角位移输出(第 1 行)显示目标向前转动 30 弧度,然后沿负方向转回,直至达到 -20 弧度。如果您选中包角为 [0, 2*pi] 复选框,则输出(第 2 行)保持在 0 到 2π 弧度的范围内。
选中包角为 [0, 2*pi] 复选框,可简化模型参数与旋转角度之间关系复杂的模型的开发,例如泵和电机。
示例
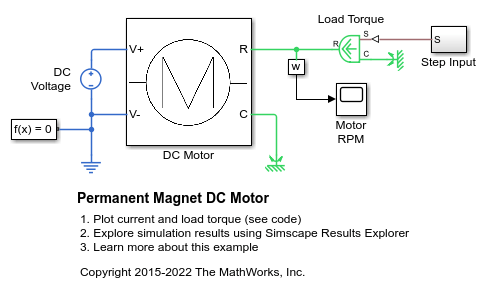
永磁 DC 电机
此示例展示了如何使用测试框架和 Simscape™ 模块来验证 DC 电机的空载转速、空载电流和堵转转矩制造商规格。
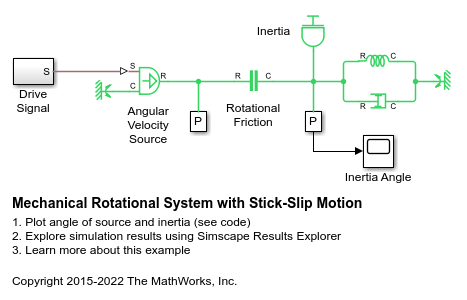
具有粘滑运动的机械旋转系统
该模型显示了一个具有粘滑摩擦的机械旋转系统。一个惯性体通过弹簧和阻尼器连接到一个固定点。惯性体由速度源通过一个粘滑摩擦元件驱动。由于摩擦元件的起动摩擦和库仑摩擦存在差异,导致惯性体出现粘滑运动。