Rotational Friction
旋转物体之间接触时的摩擦

库:
Simscape /
Foundation Library /
Mechanical /
Rotational Elements
描述
Rotational Friction 模块表示旋转物体之间接触时的摩擦。摩擦扭矩被仿真为相对速度的函数,并假定为斯特里贝克分量、库仑分量和粘性分量的总和,如下图所示。

斯特里贝克摩擦 TS 是发生在低速时的负倾斜特性[1]。库仑摩擦 TC 在任何速度下都会产生恒定的扭矩。粘性摩擦 TV 以与相对速度成正比的扭矩来抵抗运动。零速度附近的库仑摩擦与斯特里贝克摩擦的总和通常称为起动摩擦 Tbrk。此摩擦可通过以下方程进行近似计算:
其中
T 是摩擦扭矩。
TC 是库仑摩擦扭矩。
Tbrk 是起动摩擦扭矩。
ωbrk 是起动摩擦速度。
ωSt 是斯特里贝克速度阈值。
ωCoul 是库仑速度阈值。
ωR 和 ωC 分别是端口 R 和 C 的绝对角速度。
ω 是相对速度。
f 是粘性摩擦系数。
力方程的斯特里贝克部分中使用的指数函数是连续的,并且在速度模大于起动摩擦速度时衰减。
力方程的库仑部分中使用的双曲正切函数可确保方程在 ω = 0 时是平滑且连续的,但在非零速度下可快速达到其满值。
此模块的正方向是从端口 R 到端口 C。这意味着,如果端口 R 的速度大于端口 C 的速度,则此模块将扭矩从端口 R 传递到端口 C。
变量
要在仿真之前设置模块变量的优先级和初始目标值,请使用模块对话框或属性检查器中的初始目标部分。有关详细信息,请参阅设置模块变量的优先级和初始目标值。
标称值提供了一种指定模型中变量的预期模的方法。使用基于标称值的系统缩放可提高仿真的稳健性。标称值可以来自不同的来源,其中之一是模块对话框或属性检查器中的的标称值部分。有关详细信息,请参阅Modify Nominal Values for a Block Variable。
示例
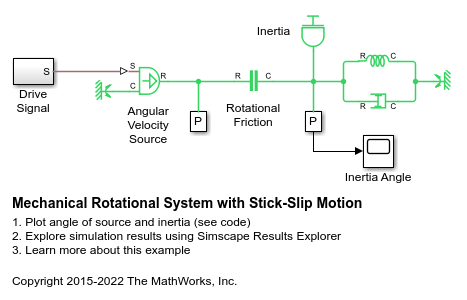
具有粘滑运动的机械旋转系统
该模型显示了一个具有粘滑摩擦的机械旋转系统。一个惯性体通过弹簧和阻尼器连接到一个固定点。惯性体由速度源通过一个粘滑摩擦元件驱动。由于摩擦元件的起动摩擦和库仑摩擦存在差异,导致惯性体出现粘滑运动。
端口
守恒
参数
起动摩擦扭矩,即库仑摩擦和静摩擦的总和。它必须大于或等于库仑摩擦扭矩值。
斯特里贝克摩擦达到其峰值时的角速度。此时,斯特里贝克摩擦和库仑摩擦的总和为起动摩擦扭矩。此参数指定速度阈值,它影响仿真准确性和速度之间的权衡。

库仑摩擦扭矩,即在任何速度下以恒定扭矩抵抗旋转的摩擦。
摩擦扭矩与相对角速度之间的比例系数。此参数值必须大于或等于零。
参考
[1] Armstrong, B. and C.C. de Wit, Friction Modeling and Compensation, The Control Handbook, CRC Press, 1995.
扩展功能
版本历史记录
在 R2007a 中推出