Prevent Block Windup in Multiloop Control
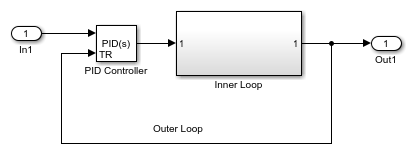
This example shows how to use signal tracking to prevent block windup in a two-loop control system.
The Inner Loop subsystem contains a saturation limit:
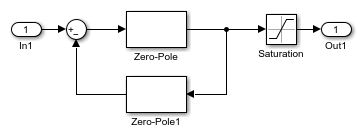
In this example, the inner loop has an effective gain of 1 when it does not saturate. When the inner loop does saturate, however, the integrator in the PID Controller can begin to wind up.
If the PID controller tracks the output of the inner loop, then its output never exceeds the saturated inner-loop output. To achieve this tracking, connect the Saturation block output to the tracking input of the PID Controller.