Continuous
连续函数模块,例如 Derivative 和 Integrator
使用 Continuous 库中的模块进行微分方程建模。您可以使用信号的时间导数。您可以对信号进行积分或延迟信号。您可以使用传递函数或状态空间表示来对 PID 控制器和线性系统建模。
模块
| Derivative | 计算连续输入信号关于时间的逼近连续导数 |
| Descriptor State-Space | 模型线性隐式系统 |
| Entity Transport Delay | 引入 SimEvents 消息传播的延迟 |
| First Order Hold | 在输入信号上实现线性外插一阶保持 |
| Integrator | 对信号求积分 |
| Integrator Limited | 对信号求积分 |
| PID Controller | 连续时间或离散时间 PID 控制器 |
| PID Controller (2DOF) | 连续时间或离散时间二自由度 PID 控制器 |
| Second-Order Integrator | 输入信号的二阶积分 |
| Second-Order Integrator Limited | 输入信号的二阶积分 |
| State-Space | 将连续线性系统建模为显式状态空间方程组 |
| Transfer Fcn | 将线性系统建模为传递函数 |
| Transport Delay | 按给定的时间量延迟输入 |
| Variable Time Delay | 按可变时间量延迟输入 |
| Variable Transport Delay | 按可变时间量延迟输入 |
| Zero-Pole | 使用零极点增益传递函数进行系统建模 |
主题
- 连续系统建模
对具有基于连续时间定义的变量的系统建模。
精选示例
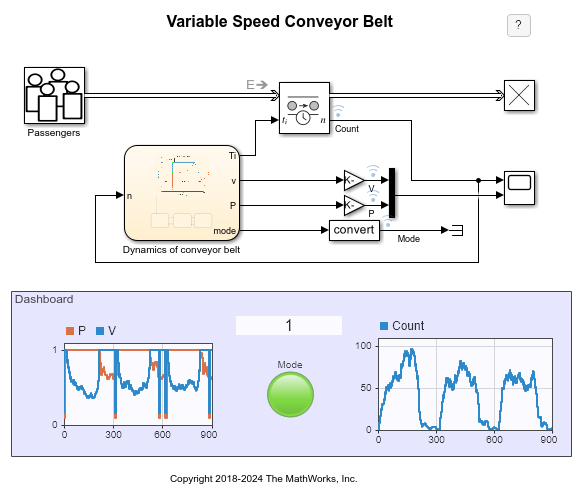
信息物理系统建模
对变速传送带中的传输延迟进行建模。
教学资源

用于控制的虚拟硬件和实验
学习构建开/闭环反馈控制系统、计算传递函数和执行位置分析的概念。