Second-Order Integrator
输入信号的二阶积分
库:
Simulink /
Continuous
描述
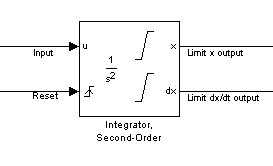
Second-Order Integrator 模块和 Second-Order Integrator Limited 模块用来求解器二阶初始值问题:
其中 u 是系统的输入信号。因此,此模块是一个动态系统,它具有两个连续状态:x 和 dx/dt。
注意
这两个状态存在一种数学关系,即,dx/dt 是 x 的导数。为了在整个仿真过程中满足这种关系,Simulink 对模块的参数和行为进行了诸多限制。
Second-Order Integrator Limited 模块除了默认情况下基于指定的上限和下限值来限制状态外,它与 Second-Order Integrator 模块完全相同。有关详细信息,请参阅限制状态。
Simulink® 软件可以使用若干不同的数值积分方法来计算模块的输出。每一种方法都有适用于特定情景的优点。使用“配置参数”对话框的求解器窗格可以选择最适合您的应用的方法。(有关详细信息,请参阅求解器选择标准。)所选求解器使用当前输入值计算 Second-Order Integrator 模块在当前时间步的状态。
使用模块参数对话框可以:
指定每个状态初始条件的来源是内部还是外部
为状态初始条件指定值
为一个或两个状态定义上限和下限
为每个状态指定绝对容差
为两个状态指定名称
选择外部重置条件
启用过零检测
当 x 达到饱和时重新初始化 dx/dt
指定 Simulink 忽略状态限制和外部重置以进行线性化操作
定义初始条件
可以在模块对话框上将每个状态的初始条件逐个定义为参数,或者从外部信号输入一个或全部两个初始条件。
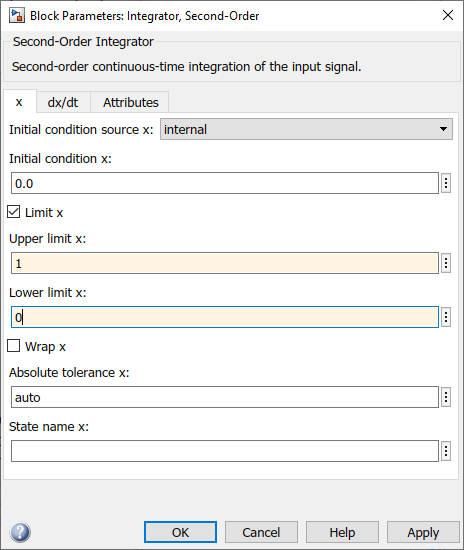
要将状态 x 的初始条件定义为模块参数,请从 x 初始条件来源下拉菜单中选择内部,并在 x 初始条件字段中输入值。
要从状态 x 的外部源提供初始条件,请将初始条件来源参数指定为外部。模块上出现一个额外的输入端口。
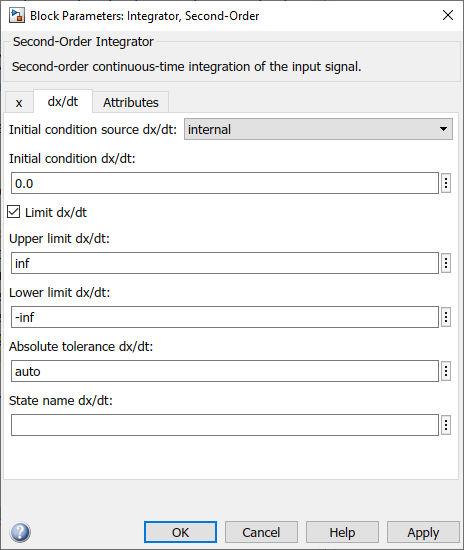
要将状态 dx/dt 的初始条件定义为模块参数,请从 dx/dt 初始条件来源下拉菜单中选择内部,并在 dx/dt 初始条件字段中输入值。
要从外部源为状态 dx/dt 提供初始条件,请将 dx/dt 初始条件来源指定为外部。模块上出现一个额外的输入端口。
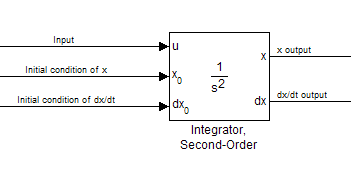
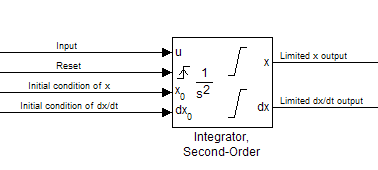
如果您为两个状态初始条件都选择使用外部源,您的模块将如下所示。
注意
Simulink 不允许初始条件值为
inf或NaN。如果您通过指定饱和界限来限制状态 x 或状态 dx/dt (请参阅限制状态),而一个或多个初始条件位于对应的范围外,则相应的状态将被初始化为最接近的有效值,并计算一组一致的初始条件。
限制状态
为二阶系统建模时,您可能需要限制模块的状态。例如,气缸内的活塞运动受牛顿第二定律制约,对活塞的位置 (x) 有所限制。使用 Second-Order Integrator 模块,您可以限制状态 x 和 dx/dt,使它们相互独立。您甚至可以在仿真过程中更改限制;但是,您不能改变状态是否受限制。一个重要的原则是,上限必须严格大于对应的下限。
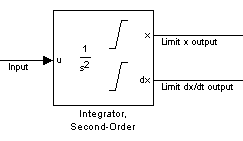
当您限制了一个或两个状态时,模块的外观将发生变化。在这两种状态都受限制的情况下,模块显示如下。
对于每个状态,您可以使用模块参数对话框设置适当的饱和界限范围。
仅限制 x
如果您使用 Second-Order Integrator Limited 模块,默认情况下会限制两个状态。但是,您可以通过选择 x 限制并在相应的参数字段中输入范围,手动限制 Second-Order Integrator 模块上的状态 x。
这样,模块将按如下方式确定状态的值:
当 x 小于或等于下限值时,x 的值保持在下限值,dx/dt 设置为零。
当 x 介于下限值和上限值之间时,两个状态都按照二阶 ODE 给出的轨迹变化。
当 x 大于或等于上限值时,x 的值保持在上限值,dx/dt 设置为零。
您可以选择在 x 达到饱和时将 dx/dt 重新初始化为新的值。请参阅当 x 达到饱和时重新初始化 dx/dt。
仅限制 dx/dt
与状态 x 一样,状态 dx/dt 默认情况下在 Second-Order Integrator Limited 模块对话框的 dx/dt 窗格上设置为受限制。您可以在 Second-Order Integrator 模块上手动设置参数 dx/dt 限制。在任一情况下,都必须为 dx/dt 输入适当的限制。
如果您只限制状态 dx/dt,模块将按如下方式确定 dx/dt 的值:
当 dx/dt 小于或等于下限值时,dx/dt 的值保持在下限值。
当 dx/dt 介于下限值和上限值之间时,两个状态都按照二阶 ODE 给出的轨迹变化。
当 dx/dt 大于或等于上限值时,dx/dt 的值保持在上限值。
当状态 dx/dt 保持在上限值或下限值时,x 的值受一阶初始值问题制约:
其中 L 是 dx/dt 的限制值(上限或下限),tL 是 dx/dt 达到此限制值的时间,xL 是状态 x 在该时间的值。
限制两个状态
当您限制两个状态时,Simulink 将通过限制允许的 dx/dt 上限和下限值,使状态在数学意义上保持一致。这种限制对于满足以下约束很有必要:
当 x 达到饱和界限值时,dx/dt 的值必须为零。
要使 x 离开上限值,dx/dt 的值必须严格为负。
要使 x 离开下限值,dx/dt 的值必须严格为正。
对于这些情况,dx/dt 的上限值必须严格为正,dx/dt 的下限值必须严格为负。
当两个状态都受限制时,模块将按如下方式确定状态:
当 x 达到其限制值时,产生的行为与“仅限制 x”中描述的相同。
当 dx/dt 达到其限制值之一时,产生的行为与“仅限制 dx/dt”中描述的相同 - 包括当 dx/dt 保持在其限制值时使用一阶 ODE 计算 x。在这种情况下,当 x 达到其限制值之一时,它会保持在该限制值并将 dx/dt 设置为零。
当二者同时达到各自的限制值时,状态 x 的行为将覆盖 dx/dt 的行为,以保持状态的一致性。
如果您限制了两个状态,可以选择在状态 x 达到饱和时重新初始化 dx/dt。如果重新初始化后的值超出了 dx/dt 的指定范围,则将 dx/dt 重新初始化为最接近的有效值,并计算一组一致的初始条件。请参阅 当 x 达到饱和时重新初始化 dx/dt。
重置状态
模块可以根据外部信号将其状态重置为指定的初始条件。要使模块重置其状态,请选择属性窗格上的外部重置选项之一。模块输入端口下方将显示一个触发端口,并指示触发类型。
选择上升沿可在重置信号从零上升到正值、从负值上升到正值或从负值上升到零时重置状态。
选择下降沿可在重置信号从正值下降到零、从正值下降到负值或从零下降到负值时重置状态。
选择任一沿可在重置信号从零变为非零值或改变符号时重置状态。
重置端口具有直接馈通。如果模块输出直接或通过一系列带直接馈通的模块反馈到此端口中,则会产生代数环(请参阅代数环概念)。
启用过零检测
此参数控制是否为此模块启用过零检测。默认情况下,属性窗格上的启用过零检测参数处于选中状态。但是,仅当“配置参数”对话框的求解器窗格上的过零控制设置为使用局部设置时,此参数才起作用。有关详细信息,请参阅过零检测。
当 x 达到饱和时重新初始化 dx/dt
对于某些建模应用程序,当状态 x 达到其限制值时,必须重新初始化 dx/dt,以使 x 立即退出饱和状态。您可以通过在属性窗格上选择当 x 达到饱和时重新初始化 dx/dt 来实现这一目的。
如果启用了此选项,当 x 达到饱和的那一刻,Simulink 将检查 dx/dt 初始条件(参数或信号)的当前值是否允许状态 x 立即退出饱和。如果允许,Simulink 将使用那一刻的初始条件(参数或信号)值重新初始化状态 dx/dt。如果不允许,Simulink 将在当前时刻忽略此参数,并将 dx/dt 设置为零,以使模块状态保持一致。
只有在 x 真正达到饱和界限的那一刻,此参数才适用。在那之后的任何时间,即在 x 保持饱和时,此参数并不适用。
有关详细信息,请参阅关于限制状态的各节内容。有关示例,请参阅弹球的仿真。
忽略状态限制和外部重置以进行线性化
如果您希望通过线性化来简化模型,可以选中忽略状态限制和重置以便于线性化,以使 Simulink 忽略状态限制和外部重置。
指定模块输出的绝对容差
默认情况下,Simulink 软件会使用在“配置参数”对话框中指定的绝对容差值(请参阅Error Tolerances for Variable-Step Solvers)来计算 Integrator 模块的输出。如果此值不能提供足够的误差控制,请在参数对话框的 x 绝对容差字段中为状态 x 指定更合适的值,在 dx/dt 绝对容差字段中为状态 dx/dt 指定更合适的值。Simulink 将使用您指定的值来计算模块的状态值。
指定输出端口的显示
您可以使用 ShowOutput 参数控制是显示 x 还是 dx/dt 输出端口。您可以显示一个输出端口,也可以显示两个;但必须至少选择一个。
指定状态名称
您可以使用 StateNameX 和 StateNameDXDT 参数指定 x 状态和 dx/dt 状态的名称。但是,您必须为这两个状态都指定名称,或者都不指定名称;不能只为 x 或者只为 dx/dt 指定名称。这两个状态名称必须具有完全相同的类型和长度。而且,状态数量必须能够被名称数量整除。
选择所有选项
如果选择所有选项,模块图标将如下所示。
示例
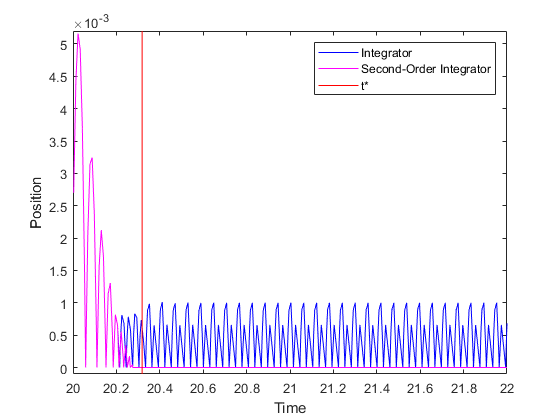
弹球的仿真
此示例使用一个弹球的两个模型来说明对具有 Zeno 行为的混合动态系统进行建模的不同方法。一般来说,Zeno 行为的特征可非正式地表示为某些混合系统在有限时间间隔内发生无限数量的事件。球在失去能量的同时,球与地面发生碰撞的时间间隔越来越短。
端口
输入
输出
参数
扩展功能
版本历史记录
在 R2010a 中推出