Zero-Pole
使用零极点增益传递函数进行系统建模
库:
Simulink /
Continuous
描述
Zero-Pole 模块可以通过指定零点、极点和拉普拉斯域传递函数增益定义的系统进行建模。您可以使用此模块对单输入单输出 (SISO) 和单输入多输出 (SIMO) 系统进行建模。
Zero-Pole 模块有以下要求:
传递函数的形式必须为
其中 Z 表示零点,P 表示极点,K 表示传递函数的增益。
极点数必须大于或等于零点数。
复极点和复零点必须为复共轭对组。
对于多输出系统,所有传递函数必须具有相同的极点。零点的值可以不同,但每个传递函数的零点数必须相同。
提示
要对一个多输出系统建模(其中传递函数具有不同的零点数或者每个传递函数只有一个零点),请使用多个 Zero-Pole 模块。
对单输出系统建模
一个单输出系统具有标量时域输入和输出信号。要对这种类型的系统建模,请执行以下操作:
在零点字段中输入传递函数的零点向量。
在极点字段中输入传递函数的极点向量。
在增益字段中输入传递函数的增益标量。
对多输出系统建模
一个多输出系统具有一个标量时域输入信号和一个向量时域输出信号。向量输出中的每个元素均为该系统的一个输出。要对这种类型的系统建模,请执行以下操作:
在零点字段中输入全零矩阵。
矩阵的每一列包含一个传递函数(将系统输入信号与输出信号中的一个元素相关联)的零点。
在极点字段中输入对系统的所有传递函数都通用的极点向量。
在增益字段中输入增益向量。
每个元素代表对应的传递函数在零点矩阵中的增益。
示例
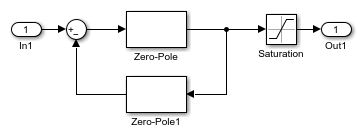
Prevent Block Windup in Multiloop Control
Use signal tracking to prevent block windup in a two-loop control system.
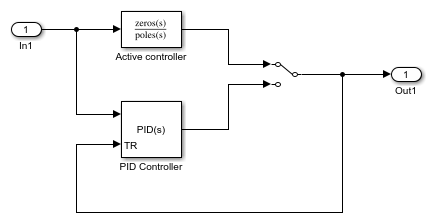
Bumpless Control Transfer
This example shows how to use signal tracking to achieve bumpless control transfer in a system that switches between a PID Controller block and another controller.
端口
输入
输出
参数
模块特性
数据类型 |
|
直接馈通 |
|
多维信号 |
|
可变大小信号 |
|
过零检测 |
|
提示
Zero-Pole 模块图标中传递函数的外观取决于您如何指定零点、极点和增益参数。
如果这两个参数指定为表达式或向量,模块将显示具有指定的零点、极点和增益的传递函数。如果在括号中指定变量,模块将计算变量。
例如,下图显示当您将零点参数指定为
[3 2 1]、将极点参数指定为(poles)(其中poles是值为[7 5 3 1]的变量)、将增益参数指定为gain时模块的外观。
如果您将每个参数指定为变量,该模块将显示定义增益参数值的变量名称,后跟一个通用传递函数。
例如,下图显示当您将零点参数指定为变量
zeros、将极点参数指定为变量poles、将增益参数指定为变量gain时模块的外观。
当模块不够大而无法使用参数值显示传递函数时,传递函数显示的分子为
zeros(s),分母为poles(s)。
扩展功能
版本历史记录
在 R2006a 之前推出