Variable Pulse Generator
生成理想的时变脉冲信号
库:
Simulink /
Discontinuities
示例
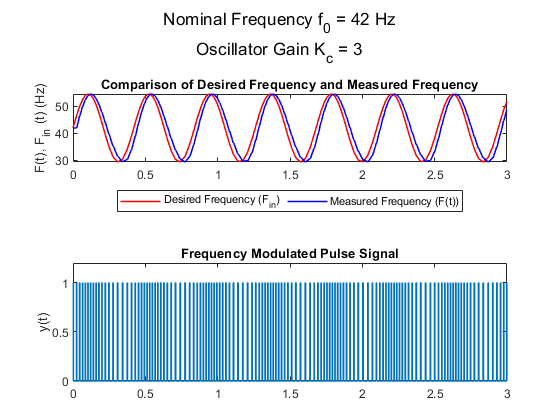
此示例说明如何使用 Variable Pulse Generator 模块来创建频率振荡,从而创建一个理想的压控振荡器模型。
压控振荡器使用输入调节电压来产生不同频率的波形。在很小的电压范围内,输入电压 ( ) 与输出振荡频率 (
) 与输出振荡频率 ( ) 之间的关系成正比,可表示为:
) 之间的关系成正比,可表示为:

其中
 是振荡器敏感度,单位为 Hz/V
是振荡器敏感度,单位为 Hz/V 是振荡器在
是振荡器在  时的静态频率或标称频率
时的静态频率或标称频率

在所包括的 vco_using_vpg 模型中,使用方程 (1) 中所示的公式生成期望的振荡频率信号 F_{in}(t)。在此模型中,调节电压 是正弦波形。
端口
输入
输出
参数
模块特性
数据类型 |
|
直接馈通 |
|
多维信号 |
|
可变大小信号 |
|
过零检测 |
|
算法
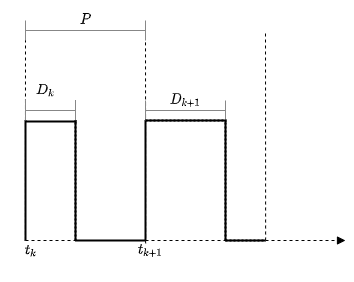
对于从时间 tk 开始的脉冲
其中 pw 是脉冲宽度。对于给定周期 P,pw 与占空比 D
成正比
在离散采样模式下,输入占空比信号以以固定时间间隔运行参数指定的速率采样。
对于指定的采样率 tS ,宽度为 pw 的脉冲所需的采样数可以表示如下:
其中 nP 是仿真周期为 P 的脉冲所需的采样数。
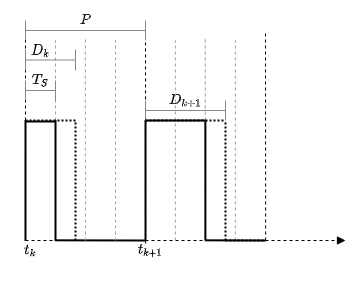
假设有一个周期为 P 的标称脉冲,模块的采样率设置为 tS= 0.25 P。一个脉冲周期所需的采样数 nP= 4。因此,对于输入占空比 D= 0.47 ,采样数 n pw 向下取整为 = 1。因此,对于周期中 4 个采样中的第 1 个,脉冲为高电平。
扩展功能
版本历史记录
在 R2020b 中推出