Convert Moving Target MATLAB Code to a Simulink Model
This example shows you how to convert MATLAB® algorithms into a Simulink® model using a moving target example. The conversion allows you to build models that contain MATLAB and Simulink components. This example uses MATLAB code for target creation and deletion then shows you how to convert that functionality into Simulink.
Moving Target MATLAB Code
This example uses MATLAB to create, move, visualize, and delete targets. Two different MATLAB packages generate two separate target databases. The target creator is a System object® since it requires the use of states. The target database is a global database. The target checker, which determines if the target is out of range and deletes the target if it is out of range, is a System object because it requires the use of states. The target position updater is a simple algorithm and is therefore a MATLAB function. The target visualizer is a System object and requires the use of states.
For this example, an initDB function is used to initialize the global database and create the Target Struct. Then, the targets are created using the Target Creator function and the Target Creation info Package. The out-of-range targets are then deleted. The target range is 5 for this example, so any target greater than 5 is deleted, and the remaining target positions are updated. This process is looped over 100 times and visualized as it runs.
TargetIllustrationScript;
Moving Target Simulink Model
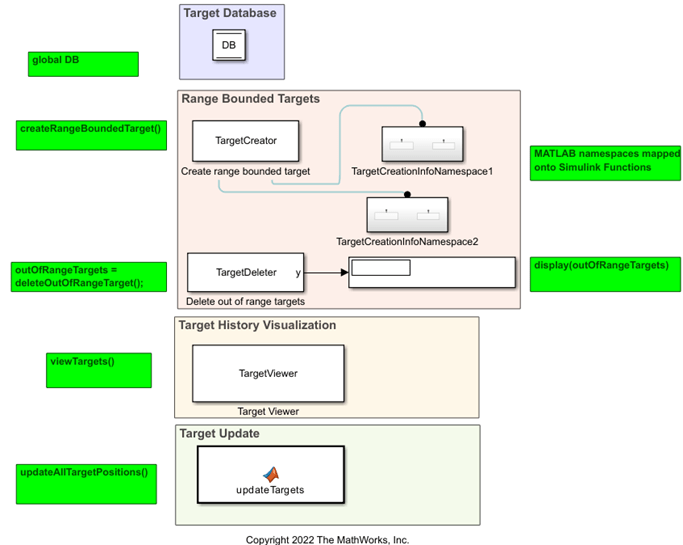
open_system('slexTargetIllustrationModel.slx')The MATLAB script can be converted into a Simulink model that has the same functionality. The Target Database is converted to a DSM using the Model PostLoadFcn and Simulink.Bus.createObject. Convert the Target Creation info Package to a Simulink Function. The target creator, target deleter, and target viewer are each converted into a MATLAB System block since they use System objects in MATLAB. The target viewer also uses a Display block to visualize the targets as the simulation runs. The target updater is converted into a MATLAB Function block since it is a simple MATLAB function that does not use System objects or states. The number of time steps in the loop corresponds with the stop time in the toolbar.
The target creator uses scoped functions in the MATLAB code to call the target creation packages. Use the getGlobalNamesImpl and getSimulinkFunctionNamesImpl APIs in Simulink to declare the function names for the Target Creator System object. These functions declare the target creation package position and velocity names in the target creation package so the package can be called by the System objects in Simulink.
To run the model, click Run. After the model compiles, it produces a visualization just like in the MATLAB code.
sim('slexTargetIllustrationModel.slx');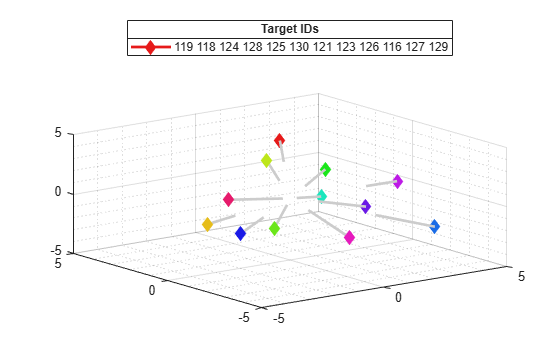
Common Conversions of MATLAB Code to Simulink Behavior
This list includes some examples of how you can map MATLAB code to Simulink blocks, parameters, and features.
struct— BusArray of
struct— Array of busesGlobal — Data Store Memory
Function — MATLAB Function block
System object — MATLAB System block
System object calls to external functions — System block calls to Simulink functions
Scheduling algorithm — Stateflow® chart
Top-level loop (for example: "
for t = 1:0.1:10") — Simulink start time, stop time, and time stepParameter tuning in MATLAB algorithms — Simulink tunable parameters
Iteration over an array — For-each subsystem
if-elseloop — If block and if-action subsystemSwitch-case statement — Switch Case block and Switch Case Action Subsystem block
whileloop — While Iterator blockGlobal access to resources, such as databases, file handles, communication ports, or hardware devices — Data Store Memory or Simulink Functions
Persistent variables — Discrete states in System object or
persistentkeyword in MATLAB Function blockDynamic array — Variable-size signals
Fixed-point
fiobject — Simulink fixed-pointCell array — Use
structto represent uniform cell array
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)