Specify Output Characteristics of MATLAB System Block
This example shows how to specify output size, data type and complexity of a MATLAB System block.
System Objects
System objects allow you to implement algorithms using MATLAB®. System objects are a specialized kind of MATLAB object, designed specifically for implementing and simulating dynamic systems with inputs that change over time.
After you define a System object™, you can include it in a Simulink® model using a MATLAB System block.
Model Description
This example has a MATLAB System block that adds input number of seconds to the current time and produces the resulting hours, minutes and seconds as outputs. The output values from each output port are displayed in the Display blocks.
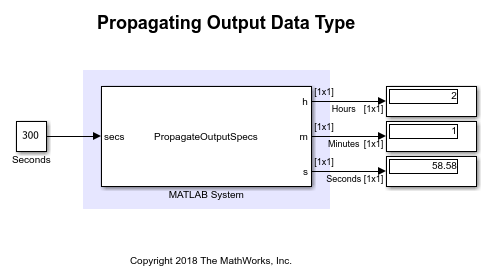
This example shows how to specify output size, data type, and complexity of a System object. You specify the output properties when MATLAB System block cannot infer them automatically. The MATLAB System block uses the System object PropagateOutputSpecs that implements methods to propagate input data type, size and complexity.
System Object Class Definition
You can access MATLAB source code used by the MATLAB System block by clicking the "Source code" hyperlink from the block dialog box. The System object PropagateOutputSpecs implements the stepImpl method that adds the input value in seconds to current time and outputs the resulting hours, minutes and seconds. The stepImpl method uses datetime function to calculate its output. Since datetime function is not supported for code generation, MATLAB System block cannot infer the output specifications automatically. The System object implements the following methods to specify output properties:
getOutputSizeImpl- Specify output sizegetOutputDataTypeImpl- Specify output data typeisOutputComplexImpl- Specify output complexityisOutputFixedSizeImpl- Specify whether output can be variable-size
classdef PropagateOutputSpecs < matlab.System
% PropagateOutputSpecs Propagation in Simulink
methods(Access = protected)
function [h, m, s] = stepImpl(~, secs)
% Add input hours, minutes and seconds to current time
d = datetime;
d = d + seconds(secs);
h = hour(d);
m = minute(d);
s = second(d);
end
function [o1, o2, o3] = getOutputSizeImpl(obj)
% Return size for output port to be same as input port
inSize = propagatedInputSize(obj, 1);
o1 = inSize;
o2 = inSize;
o3 = inSize;
end
function [o1, o2, o3] = getOutputDataTypeImpl(obj)
% Return data type for output port to be same as input port
inType = propagatedInputDataType(obj, 1);
o1 = inType;
o2 = inType;
o3 = inType;
end
function [o1, o2, o3] = isOutputComplexImpl(~)
% Return output port complexity to be real
o1 = false;
o2 = false;
o3 = false;
end
function [o1, o2, o3] = isOutputFixedSizeImpl(~)
% Return true for each output port with fixed size
o1 = true;
o2 = true;
o3 = true;
end
end
end
See Also
getOutputSizeImpl | isOutputComplexImpl | isOutputFixedSizeImpl | getOutputSizeImpl | getOutputDataTypeImpl