Passivity Enforcement
Modify control actions to satisfy passivity constraints and action bounds
Since R2023a
Libraries:
Simulink Control Design /
Constraint Control
Description
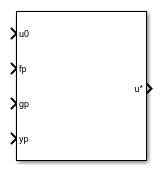
The Passivity Enforcement block computes the modified control actions that are closest to specified control actions subject to passivity constraints and action bounds.
The block uses a quadratic programming (QP) solver to find the control action u that minimizes the function in real time. Here, u0 is the unmodified control action from the controller.
The solver applies the following constraints to the optimization problem.
Here:
ρ is the passivity index.
yp is the passivity output function, defined as .
fp and gp are the functions defined by the passivity input function .
umin is a lower bound for the control action.
umax is an upper bound for the control action.
For more information on passivity enforcement, see Passivity Enforcement for Control Design.
Examples
Enforce Passivity Constraints for Quadruple-Tank System
Enforce passivity constraints for water height control in a quadruple tank system.
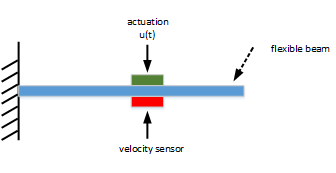
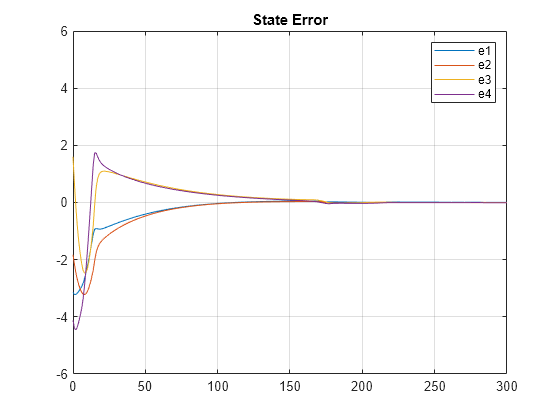
Enforce Passivity Constraint for Flexible Beam
Enforce passivity constraints for vibration control in a flexible beam.
Ports
Input
Output
Parameters
Parameters Tab
Specify the number of actions to apply bounds to and optimize.
Programmatic Use
Block Parameter:
nu |
| Type: character vector |
Default:
'1' |
Specify passivity index to enforce. Specify Passivity index as a nonnegative scalar or as a vector of nonnegative values with dimensions equal to Nu-by-1, where Nu is equal to the Number of actions parameter.
Programmatic Use
Block Parameter:
rho |
| Type: character vector |
Default:
'0.1' |
Select this parameter to add the umax input port for external upper action bounds.
Programmatic Use
Block Parameter:
external_umax |
| Type: character vector |
Values:
'off'|'on' |
Default:
'off' |
Select this parameter to add the umin input port for external lower action bounds.
Programmatic Use
Block Parameter:
external_umin |
| Type: character vector |
Values:
'off'|'on' |
Default:
'off' |
Block Tab
Specify the output data type.
The Data Type Assistant helps you set
data attributes. To use the Data Type
Assistant, click ![]() .
.
You can specify the following data types.
Built in—singleordoubledata types.Expression— Use a MATLAB expression that specifies the type.
For more information, see Specify Data Types Using Data Type Assistant.
Specify the sample time for running the optimization.
Programmatic Use
Block Parameter:
Ts |
| Type: character vector |
Default:
'0.1' |
Specify the maximum number of optimization iterations.
Programmatic Use
Block Parameter:
maxiter |
| Type: character vector |
Default:
'200' |
Specify a tolerance value for constraint violations.
Programmatic Use
Block Parameter:
tol |
| Type: character vector |
Default:
'1e-6' |
Select this parameter to add the exitflag output port for the optimization status of the QP solver.
Programmatic Use
Block Parameter:
exitflag |
| Type: character vector |
Values:
'off'|'on' |
Default:
'off' |