RST Controller
Predictive control using a polynomial representation
Libraries:
Simscape /
Electrical /
Control /
General Control
Description
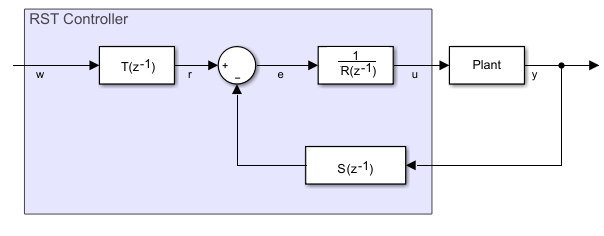
The RST Controller block implements a generalized predictive controller using a reference signal tracking polynomial representation. The diagram shows the equivalent circuit for the control algorithm.
Equations
A controlled auto-regressive integrated moving average (CARIMA) model describes the plant:
where:
d is the system dead-time.
y(k) is the plant output.
u(k) is the controller output.
e(k) is white noise with a zero-mean value.
A(z-1) and B(z-1) are the system polynomials.
nA and nB are the polynomials degrees.
C(z-1) and D(z-1) are the disturbance polynomials for obtaining the steady-state error.
The prediction model is given as
and
where:
hi is the minimum prediction.
hp is the prediction horizon.
The future control sequence, computed at time k, is
where
and hc is the control horizon.
The predicted values of the output is
To determine the system polynomials, , , and , the block uses two Diophantine equations. The first Diophantine equation is
where:
The second Diophantine equation is
where:
The resulting prediction model is
where
represents the free response of the system.
Using the matrix notation, the prediction model can be written as
where:
To minimize tracking error and controller output, the block uses a cost function. To trade off between the minimization of the tracking error and the minimization of the controller output, the block uses a weighting factor, λ, such that
for
and
where w is the reference trajectory vector. Minimizing the cost function, yields the equation for the optimal control sequence:
As γj and are elements in the first row of the matrix , applying the receding horizon principle yields the control algorithm equation as
Substitution using yields this form of the control algorithm equation:
The polynomial form of the control algorithm follows as
where:
and
Limitations
To obtain the R, S, and T polynomials, use the discrete-time instead of the continuous-time transfer function.
Examples
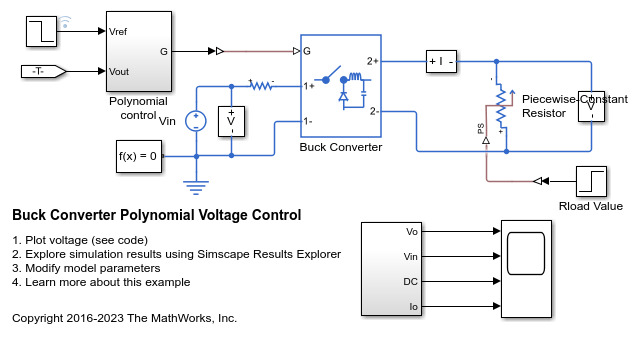
Buck Converter Polynomial Voltage Control
Control the output voltage of a buck converter using a polynomial RST controller. The RST controller adjusts the duty cycle. The input voltage is considered constant throughout the simulation. A variable resistor provides the load for the system. The total simulation time (t) is 0.25 seconds. At t = 0.15 seconds, the load is changed. At t = 0.2 seconds, the voltage reference is changed from 6V to 4V.
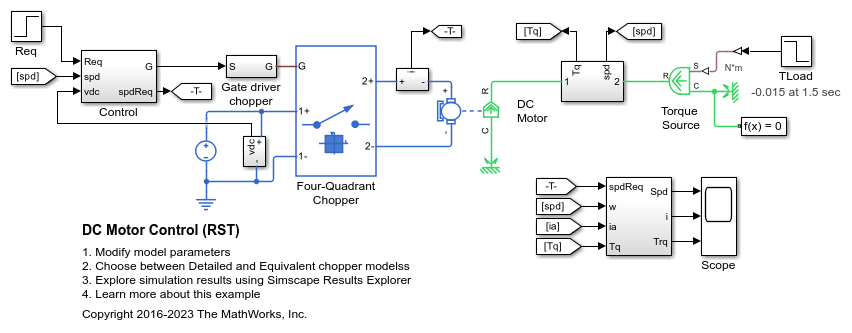
DC Motor Control (RST)
An RST speed-control structure for a DC motor. A PWM controlled four-quadrant Chopper is used to feed the DC motor. The Control subsystem includes the RST controller with control horizon of 30, and the PWM generation. A sensor measures the rotor speed with a delay of 5ms. The total simulation time (t) is 4 seconds. At t = 1.5 seconds, the load torque increases. At t = 2.5 seconds, the reference speed is changed from 1000 rpm to 2000 rpm.
Ports
Input
Output
Parameters
References
[1] Camacho, E. F. and C. Bordons. Model Predictive Control. Second Edition, London: Springer, 2007.
Extended Capabilities
Version History
Introduced in R2017b