State-Feedback Controller
Discrete-time state-feedback controller with integral action

Libraries:
Simscape /
Electrical /
Control /
General Control
Description
The State-Feedback Controller block implements a discrete-time state-feedback controller with integral action. Use this block to control linear systems with single or multiple inputs and single or multiple outputs. The integral action serves to eliminate steady-state error in the controlled outputs. You can define the controller using a precomputed optimal gain or use the state-space model of your system to generate this gain using pole placement.

Equations
The integral of the tracking error, xi, is an additional state that ensures zero steady-state error for the closed-loop system. The extended state vector is
Where:
x is the state vector.
xi is the integral of the tracking error.
xe is the extended state vector.
Therefore, the control action is
Where:
K is the feedback matrix, that is, the pole placement.
u is the controller output.
Assumptions
System state measurement and estimation occur outside the controller.
Examples
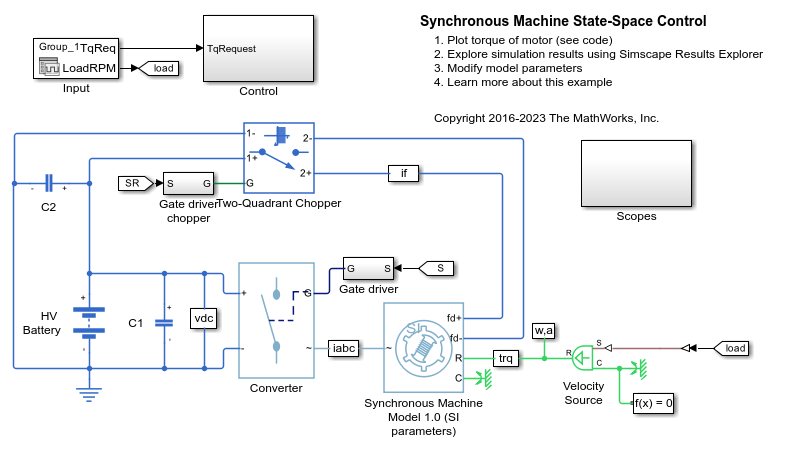
Synchronous Machine State-Space Control
Control currents in a synchronous machine (SM) based traction drive using state-space control. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and through a controlled two-quadrant chopper for the rotor winding. An ideal angular velocity source provides the load. The SM operates below the base speed. At each sample instant, the torque request is converted to relevant current references using the zero d-axis control approach. A state-feedback controller controls the currents in the rotor reference frame. A Luenberger observer obtains the velocity-dependent feedforward pre-control terms. The simulation uses several torque steps in both motor and generator modes. The task scheduling is implemented as a Stateflow® state machine. The Scopes subsystem contains scopes that allow you to see the simulation results.
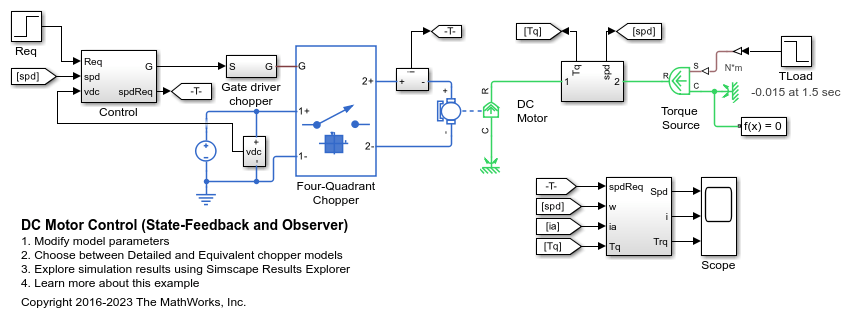
DC Motor Control (State-Feedback and Observer)
A state-feedback speed-control structure for a DC motor. A PWM controlled four-quadrant Chopper is used to feed the DC motor. The Control subsystem includes the state-feedback control loop, and the PWM generation. The state vector includes the rotor speed which is measured, and the dc motor current, which is estimated using an observer. Both the observer and state-feedback controller are synthesized by pole placement using the state-space model of the system. The total simulation time (t) is 4 seconds. At t = 1.5 seconds, the load torque increases. At t = 2.5 seconds, the reference speed is changed from 1000 rpm to 2000 rpm.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2017b