DC 电机控制 (RST)
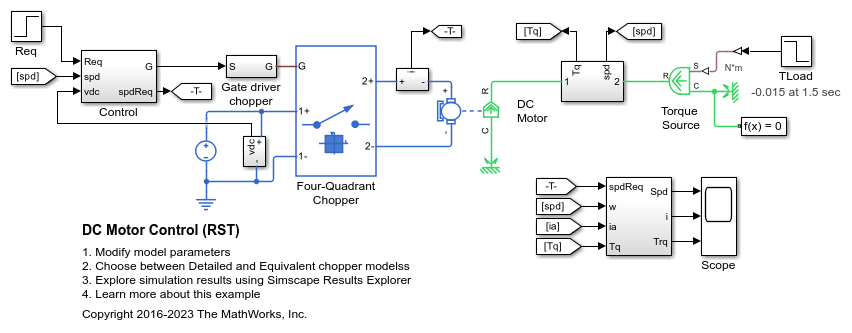
此示例展示了 DC 电机的 RST 转速控制结构。采用 PWM 控制的四象限斩波器为该 DC 电机供电。Control 子系统包括控制时域为 30 的 RST 控制器和 PWM 生成模块。传感器测量转子转速,存在 5 毫秒的延迟。总仿真时间 (t) 为 4 秒。在 t = 1.5 秒时,负载转矩增加。在 t = 2.5 秒时,参考转速从 1000 rpm 变为 2000 rpm。
模型
实时仿真结果
此示例已在以下平台上进行了测试:
配备 Intel® 3.5 GHz i7 多核 CPU 和 4 GB RAM 的 Speedgoat™ Performance 实时目标计算机。
配备 Intel® Core XEON E3-1275v3 3.5 GHz 处理器和 4 GB RAM 的 dSPACE® SCALEXIO LabBox。
您可以使用 Simscape 局部求解器,以 20 微秒的步长实时运行此模型。采样率较低时,由于缓存未预热,在初始任务执行期间可能会发生任务超限。为避免此类超限,如果所选平台支持相关选项,请通过指定有限次数的任务超限或增加实时应用程序启动阶段的周期性任务采样时间来放宽启动行为。
另请参阅
DC Motor | Four-Quadrant Chopper | RST Controller