Second-Order Filter
离散时间或连续时间低通、高通、带通或带阻二阶滤波器

库:
Simscape /
Electrical /
Control /
General Control
描述
离散时间或连续时间低通、高通、带通或带阻二阶滤波器滤波器可用于使测量信号中的噪声衰减。
Second-Order Filter 模块实现不同类型的二阶滤波器。
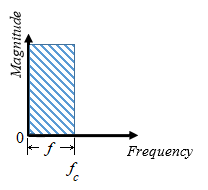
低通滤波器 - 只允许频率低于截止频率 的信号 通过。
高通滤波器 - 只允许频率高于截止频率 的信号 通过。
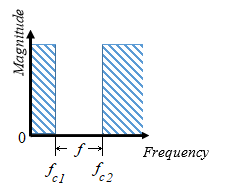
带通滤波器 - 只允许频率介于两个截止频率 和 之间的信号 通过。
带阻滤波器 - 仅阻止频率介于两个截止频率 和 之间的信号 通过。
| 滤波器类型 | 频率范围 | |
|---|---|---|
| 低通 |
| |
| 高通 |
| |
| 带通 |
| |
| 带阻 |
| |


方程
滤波器的二阶导数状态方程为:
其中:
x 是滤波器内部状态。
u 是滤波器输入。
ωn 是滤波器固有频率。
ζ 是滤波器阻尼因子。
对于每种滤波器类型,下表将模块输出 作为滤波器内部状态的函数映射到 s 域传递函数 。
| 滤波器类型 | 输出 | 传递函数 |
|---|---|---|
| 低通 | ||
| 高通 | ||
| 带通 | ||
| 带阻 |
初始化公式:
其中:
是滤波器的初始状态。
是滤波器的初始输入。
是稳态初始输入的 AC 分量。
是初始振幅。
是初始相位。
是稳态初始输入的 DC 分量。
是初始偏置。
在 s 域中,。因此,对于初始频率 ,有:
示例

Three-Phase Matrix Converter with Venturini Modulation
Use Venturini modulation techniques to compute the duty cycles and logic statements of a three-phase matrix converter that drives a static load. The control subsystem implements three different modulation algorithms: Venturini modulation, third harmonic enhanced Venturini modulation, and third harmonic injection Venturini modulation with unity input displacement factor. The maximum voltage transfer ratio between input and output depends on the modulation technique and it is equal to either q=0.5 or q=0.866. The Scope blocks show the voltages and currents V_ABC, V_abc, I_ABC, and I_abc, where _UPPERCASE is used for inputs and _LOWERCASE for outputs.
端口
输入
输出
参数
参考
[1] Agarwal, A. and Lang, J. H. Foundations of Analog and Digital Electronic Circuits. New York: Elsevier, 2005.
扩展功能
版本历史记录
在 R2018b 中推出