SM 转矩控制
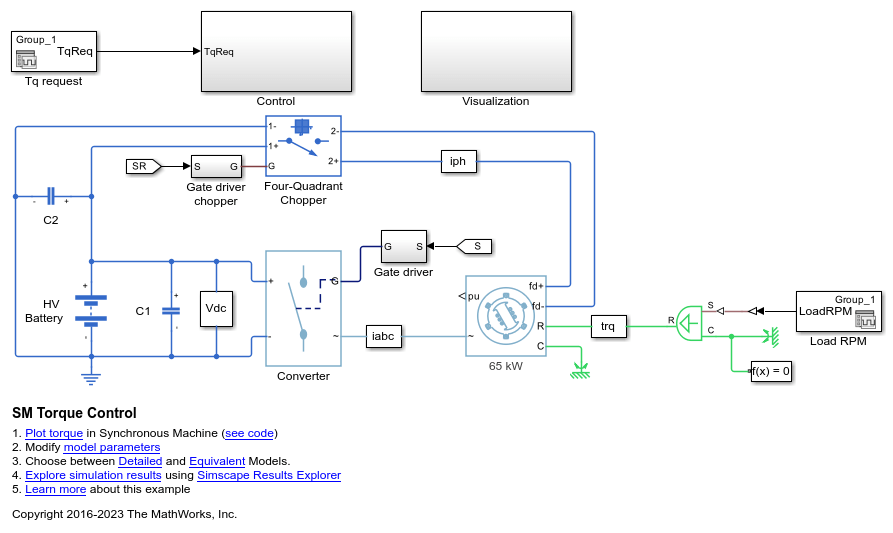
此示例展示了如何控制基于同步电机 (SM) 的电力牵引驱动装置中的转矩。高压电池通过受控三相转换器为 SM 定子绕组供电,通过受控四象限斩波器为 SM 转子绕组供电。理想角速度源提供负载。Control 子系统使用开环方法控制转矩,并使用闭环方法控制电流。在每个采样时刻,转矩请求都会转换为相关的参考电流。电流控制基于 PI。仿真在电机模式和发电机模式下都使用了多个转矩阶跃。任务调度以 Stateflow® 状态机的形式实现。Visualization 子系统包含示波器,可用于查看仿真结果。
模型
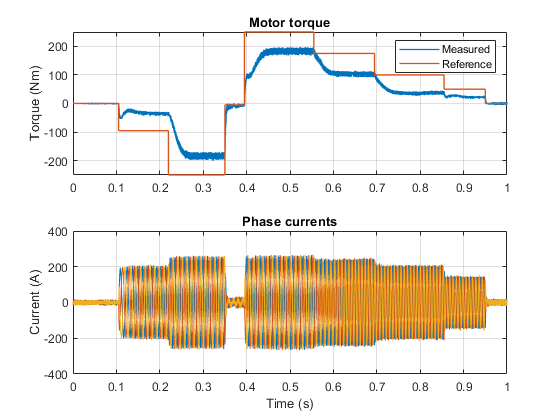
来自 Simscape 记录的仿真结果
下图显示了测试中的请求转矩和测得转矩,以及电力驱动装置中的相电流。
另请参阅
Simscape 模块
- Synchronous Machine Salient Pole | Converter (Three-Phase) | Six-Pulse Gate Multiplexer | Four-Quadrant Chopper | Four-Pulse Gate Multiplexer
模块
- PWM Generator | PWM Generator (Three-phase, Two-level) | SM Current Reference Generator | SM Current Controller | Park Transform | Inverse Park Transform