systemcomposer.arch.Architecture
模型中的架构
说明
Architecture 对象表示 System Composer™ 模型中的架构。该类派生自 systemcomposer.arch.Element 。
创建对象
使用 systemcomposer.createModel 函数创建模型,并使用 systemcomposer.arch.Model 对象上的 Architecture 属性获取根架构。
model = systemcomposer.createModel('archModel'); arch = get(model,'Architecture')
属性
对象函数
addComponent | 为架构添加组件 |
addVariantComponent | 为架构添加变体组件 |
addPort | 为架构添加端口 |
addFunction | 为软件组件的架构添加函数 |
addParameter | 为架构添加参数 |
getParameter | 从架构或组件获取参数 |
connect | 创建架构模型连接 |
smartConnect | 使用端口名称或自定义策略自动连接模型中的选定组件 |
getUnconnectedPorts | 获取未连接的端口 |
getSmartConnectPolicy | 获取智能连接政策 |
setSmartConnectPolicy | 设置智能连接策略 |
setMaskImage | 将封装图像应用到组件 |
applyStereotype | 为架构模型元素应用构造型 |
getStereotypes | 获取应用于架构模型元素的构造型 |
changeStereotype | 将当前应用的构造型更改为其构造型层次结构中的新构造型 |
removeStereotype | 从模型元素中移除构造型 |
batchApplyStereotype | 将构造型应用于架构中的所有元素 |
iterate | 遍历模型元素 |
instantiate | 根据规范创建分析实例 |
setProperty | 设置与应用于元素的构造型相对应的属性值 |
getProperty | 获取与应用于元素的构造型相对应的属性值 |
getPropertyValue | 获取架构属性值 |
getEvaluatedPropertyValue | 从元素中获取属性的计算值 |
getStereotypeProperties | 获取元素上的构造型属性名称 |
removeProfile | 从模型中移除配置文件 |
applyProfile | 将配置文件应用到模型 |
hasStereotype | 查找元素是否已应用构造型 |
hasProperty | 查找元素是否具有属性 |
getEvaluatedParameterValue | 从元素中获取参数的计算值 |
getParameterNames | 获取元素上的参数名 |
getParameterValue | 获取参数值 |
setParameterValue | 设置参数值 |
setUnit | 设置参数值的单位 |
resetParameterToDefault | 将组件上的参数重置为默认值 |
示例
使用 System Composer™ 以编程方式构建架构模型。
要构建模型,需添加包含数据接口、数据元素、值类型和物理接口的数据字典,然后添加组件、端口和连接。创建带有构造型和属性的配置文件,然后将这些构造型应用于模型元素。为端口分配专属接口。模型构建完成后,您可以创建自定义视图来关注特定的考虑因素。您还可以查询模型,根据指定的准则收集不同的模型元素。
添加组件、端口、连接和接口
创建一个模型并提取其架构。
model = systemcomposer.createModel("mobileRobotAPI");
arch = model.Architecture;创建一个数据字典并添加一个数据接口。向该数据接口添加一个数据元素。向数据字典中添加一个值类型。将数据元素的类型指定为该值类型。添加一个物理接口和带有物理域类型的物理元素。将数据字典链接到模型。
dictionary = systemcomposer.createDictionary("SensorInterfaces.sldd"); interface = dictionary.addInterface("GPSInterface"); element = interface.addElement("SignalStrength"); valueType = dictionary.addValueType("SignalStrengthType",Units="dB", ... Description="GPS Signal Strength"); element.setType(valueType); physicalInterface = dictionary.addPhysicalInterface("PhysicalInterface"); physicalElement = addElement(physicalInterface,"ElectricalElement", ... Type="electrical.electrical"); linkDictionary(model,"SensorInterfaces.sldd");
保存对数据字典的更改。
dictionary.save
保存模型。
model.save
打开模型。
systemcomposer.openModel("mobileRobotAPI");在接口编辑器中查看接口。

添加组件、端口和连接。将物理接口设置为稍后要连接的物理端口。
componentSensor = addComponent(arch,"Sensor"); sensorPorts = addPort(componentSensor.Architecture,{'MotionData','SensorPower'}, ... {'in','physical'}); sensorPorts(2).setInterface(physicalInterface) componentPlanning = addComponent(arch,"Planning"); planningPorts = addPort(componentPlanning.Architecture, ... {'Command','SensorPower1','MotionCommand'}, ... {'in','physical','out'}); planningPorts(2).setInterface(physicalInterface) componentMotion = addComponent(arch,"Motion"); motionPorts = addPort(componentMotion.Architecture,{'MotionCommand','MotionData'}, ... {'in','out'});
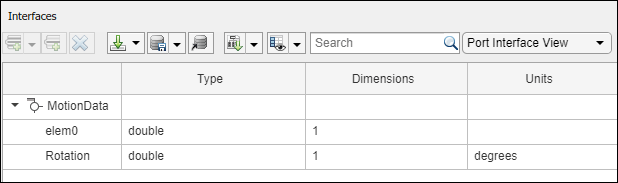
在 MotionData 端口上创建一个专属接口。在专属数据接口下添加一个专属数据元素。为数据元素 Rotation 指定一个单位设置为 degrees 的值类型。
ownedInterface = motionPorts(2).createInterface("DataInterface"); ownedElement = ownedInterface.addElement("Rotation"); subInterface = ownedElement.createOwnedType(Units="degrees");
在接口编辑器中查看接口。选择 Motion 组件上的 MotionData 端口。在接口编辑器中,将视图从字典视图切换为端口接口视图。
使用接口规则和默认名称规则连接组件。接口规则会将共享同一接口的组件端口连接起来。默认情况下,名称规则会将共享相同名称的组件端口连接起来。
c_sensorData = connect(arch,componentSensor,componentPlanning,Rule="interface");
c_motionData = connect(arch,componentMotion,componentSensor);
c_motionCommand = connect(arch,componentPlanning,componentMotion);添加和连接架构端口
在架构上添加一个架构端口。
archPort = addPort(arch,"Command","in");
connect 命令需要一个组件端口作为参量。先获取组件端口,然后进行连接。
compPort = getPort(componentPlanning,"Command");
c_Command = connect(archPort,compPort);保存模型。
model.save
按 Ctrl+Shift+A 或使用以下命令整理布局。
Simulink.BlockDiagram.arrangeSystem("mobileRobotAPI"); 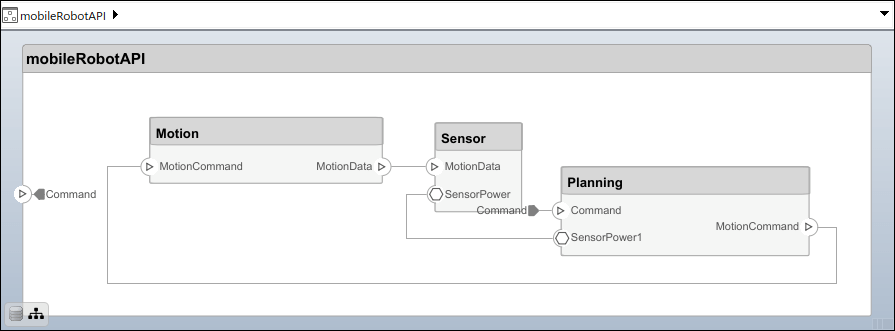
创建和应用带有构造型的配置文件
配置文件是可以应用于任何模型的 XML 文件。您可以在配置文件中添加具有属性的构造型,然后在配置文件编辑器中用特定值来为这些属性赋值。除了 System Composer 的内置分析功能之外,构造型还可以帮助您优化系统的性能、成本和可靠性。
创建配置文件并添加构造型
创建一个配置文件。
profile = systemcomposer.createProfile("GeneralProfile");创建一个适用于所有元素类型的构造型。
elemSType = addStereotype(profile,"projectElement");为不同类型的组件创建构造型。您可以根据自己的设计需求选择适当的类型。
pCompSType = addStereotype(profile,"physicalComponent",AppliesTo="Component"); sCompSType = addStereotype(profile,"softwareComponent",AppliesTo="Component");
为连接创建一个构造型。
sConnSType = addStereotype(profile,"standardConn",AppliesTo="Connector");
添加属性
为构造型添加属性。您可以使用属性来捕获模型元素的元数据,并分析非功能性需求。在导入了该配置文件的任何模型中,这些属性都会被添加到应用了该构造型的所有元素中。
addProperty(elemSType,'ID',Type="uint8"); addProperty(elemSType,'Description',Type="string"); addProperty(pCompSType,'Cost',Type="double",Units="USD"); addProperty(pCompSType,'Weight',Type="double",Units="g"); addProperty(sCompSType,'develCost',Type="double",Units="USD"); addProperty(sCompSType,'develTime',Type="double",Units="hour"); addProperty(sConnSType,'unitCost',Type="double"',Units="USD"); addProperty(sConnSType,'unitWeight',Type="double",Units="g"); addProperty(sConnSType,'length',Type="double",Units="m");
保存配置文件
profile.save;
将配置文件应用到模型
将配置文件应用到模型。
applyProfile(model,"GeneralProfile");将构造型应用于组件。有些组件是物理组件,有些组件是软件组件。
applyStereotype(componentPlanning,"GeneralProfile.softwareComponent") applyStereotype(componentSensor,"GeneralProfile.physicalComponent") applyStereotype(componentMotion,"GeneralProfile.physicalComponent")
将连接器构造型应用于所有连接。
batchApplyStereotype(arch,'Connector',"GeneralProfile.standardConn");
将通用元素构造型应用于所有连接器和端口。
batchApplyStereotype(arch,'Component',"GeneralProfile.projectElement"); batchApplyStereotype(arch,'Connector',"GeneralProfile.projectElement");
为每个组件设置属性。
setProperty(componentSensor,'GeneralProfile.projectElement.ID','001'); setProperty(componentSensor,'GeneralProfile.projectElement.Description', ... 'Central unit for all sensors'); setProperty(componentSensor,'GeneralProfile.physicalComponent.Cost','200'); setProperty(componentSensor,'GeneralProfile.physicalComponent.Weight','450'); setProperty(componentPlanning,'GeneralProfile.projectElement.ID','002'); setProperty(componentPlanning,'GeneralProfile.projectElement.Description', ... 'Planning computer'); setProperty(componentPlanning,'GeneralProfile.softwareComponent.develCost','20000'); setProperty(componentPlanning,'GeneralProfile.softwareComponent.develTime','300'); setProperty(componentMotion,'GeneralProfile.projectElement.ID','003'); setProperty(componentMotion,'GeneralProfile.projectElement.Description', ... 'Motor and motor controller'); setProperty(componentMotion,'GeneralProfile.physicalComponent.Cost','4500'); setProperty(componentMotion,'GeneralProfile.physicalComponent.Weight','2500');
将所有连接的属性设置为相同值。
connections = [c_sensorData c_motionData c_motionCommand c_Command]; for k = 1:length(connections) setProperty(connections(k),'GeneralProfile.standardConn.unitCost','0.2'); setProperty(connections(k),'GeneralProfile.standardConn.unitWeight','100'); setProperty(connections(k),'GeneralProfile.standardConn.length','0.3'); end
添加层次结构
在 Motion 组件内添加两个名为 Controller 和 Scope 的组件。定义端口。将组件连接到架构以及彼此之间,并应用连接器构造型。架构图中的层次结构可以为组件的内部行为提供更详细的描述。
motionArch = componentMotion.Architecture; motionController = motionArch.addComponent('Controller'); controllerPorts = addPort(motionController.Architecture,{'controlIn','controlOut'}, ... {'in','out'}); controllerCompPortIn = motionController.getPort('controlIn'); controllerCompPortOut = motionController.getPort('controlOut'); motionScope = motionArch.addComponent('Scope'); scopePorts = addPort(motionScope.Architecture,{'scopeIn','scopeOut'},{'in','out'}); scopeCompPortIn = motionScope.getPort('scopeIn'); scopeCompPortOut = motionScope.getPort('scopeOut'); c_planningController = connect(motionPorts(1),controllerCompPortIn);
对于输出端口连接,可以指定目标数据元素。
c_planningScope = connect(scopeCompPortOut,motionPorts(2),DestinationElement="Rotation"); c_planningConnect = connect(controllerCompPortOut,scopeCompPortIn, ... "GeneralProfile.standardConn");
保存模型。
model.save
按 Ctrl+Shift+A 或使用以下命令整理布局。
Simulink.BlockDiagram.arrangeSystem("mobileRobotAPI/Motion");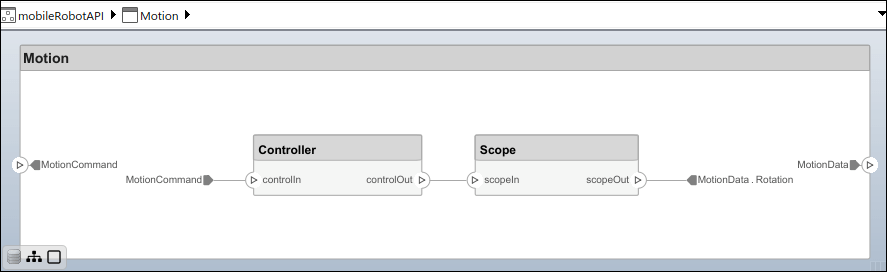
创建模型引用
模型引用可以帮助您按层次结构组织大型模型,并可实现对其架构和行为的一次定义,多次重用。当一个组件引用另一个模型时,该组件上的任何现有端口都会被删除,而引用模型上的端口会出现在该组件上。
创建一个新的 System Composer 模型。将 Controller 组件转换为引用组件,以引用新模型。要在 Controller 组件上添加端口,必须更新引用模型 mobileMotion。
referenceModel = systemcomposer.createModel("mobileMotion"); referenceArch = referenceModel.Architecture; newComponents = addComponent(referenceArch,"Gyroscope"); referenceModel.save linkToModel(motionController,"mobileMotion");
保存模型。
referenceModel.save model.save
创建变体组件
您可以使用 makeVariant 函数将 Motion 组件转换为变体组件。原始组件会作为可选的变体选择项之一嵌入到变体组件中。您可以在变体组件中设计其他变体选择项,并切换活动选择项。变体组件允许您在架构模型中以编程方式选择不同的行为设计,从而进行权衡研究和分析。
[variantComp,choice1] = makeVariant(componentMotion);
添加一个名为 MotionAlt 的变体选择项。第二个参量定义名称,第三个参量定义标签。标签用于标识选择项。活动选择项由标签控制。
choice2 = addChoice(variantComp,{'MotionAlt'},{'MotionAlt'});在 MotionAlt 上创建所需的端口。
motionAltPorts = addPort(choice2.Architecture,{'MotionCommand','MotionData'},{'in','out'});将 MotionAlt 设置为活动变体。
setActiveChoice(variantComp,"MotionAlt")按 Ctrl+Shift+A 或使用以下命令整理布局。
Simulink.BlockDiagram.arrangeSystem("mobileRobotAPI/Motion");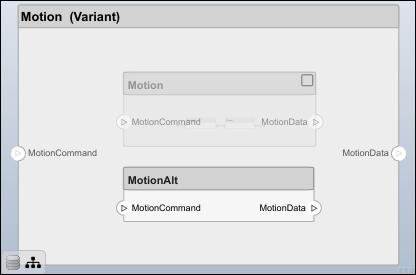
保存模型。
model.save
清理
在再次运行此示例之前,请运行此脚本以删除生成的工件。
cleanUpArtifacts
详细信息
版本历史记录
在 R2019a 中推出
另请参阅
函数
iterate|getQualifiedName|lookup|systemcomposer.createModel|systemcomposer.loadModel|systemcomposer.openModel|open|save|close|createArchitectureModel|createArchitectureSubsystem|linkToModel|inlineComponent|addComponent|addPort|getPort|setName|connect|setMaskImage|IsAdapterComponent|smartConnect|getUnconnectedPorts|getSmartConnectPolicy|setSmartConnectPolicy|destroy
对象
systemcomposer.arch.Element|systemcomposer.arch.Component|systemcomposer.arch.ComponentPort|systemcomposer.arch.ArchitecturePort|systemcomposer.arch.Connector|systemcomposer.arch.PhysicalConnector