使用具有属性的机器人系统进行简单的汇总分析
此示例显示了对机器人系统进行简单汇总分析,以计算系统各个部件的总重量和成本。您可以对任何其他系统度量执行汇总计算,例如总功率。在 System Composer™ 中,您可以使用分析工具对架构实例中的元素进行迭代,执行计算,并将结果显示在表中。
使用属性检查器打开模型并修改属性
要打开模型,请运行以下命令。
model = systemcomposer.openModel("RobotPhysicalArchitecture");在物理架构 [1] 模型中,选择 Computer 组件。在 属性检查器 中,展开 PhysicalComponent 构造型,查看或修改各个权重 UnitWeight 和各个成本 UnitCost 的属性值。

根据 SystemProfile 配置文件中的属性定义,您可以更改属性检查器中模型元素的属性值。使用 配置文件编辑器 更改 SystemProfile 配置文件的属性名称和单位。
执行简单的汇总分析以计算总成本和总重量
要执行汇总分析,请导航至建模 > 分析模型,然后打开 实例化架构模型 工具,实例化架构模型。实例模型是架构元素实例的集合。使用此实例通过将每个模型元素的单独值相加来计算系统的总重量和总成本。
在 实例化架构模型 工具中,通过选中 SystemProfile 配置文件复选框来选择所有构造型。点击文件夹图标,然后选择 CostAndWeightRollupAnalysis.m,指定分析函数。然后,对于迭代顺序,选择 Bottom-up。确认已选择严格模式,以便实例化模型中的元素仅在组合模型中的对应元素应用了构造型时才获得属性。
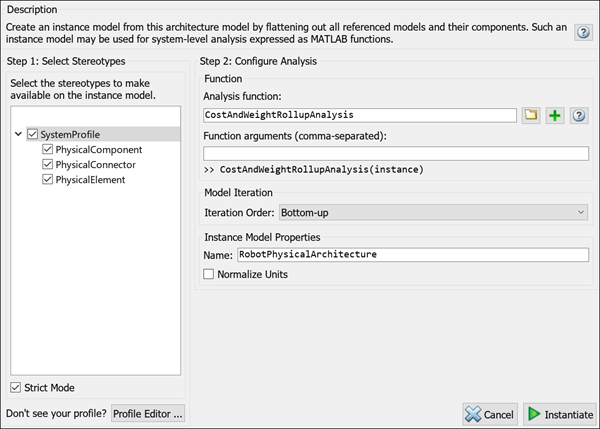
要查看实例,请点击实例化以创建实例化的架构模型并启动 分析查看器 工具。点击分析执行自下而上的分析迭代器。迭代器从架构的最深层开始,向顶层推进,将实例化架构中的每个元素作为输入参量调用分析函数。

RobotPhysicalArchitecture 架构模型的总成本为 5,100 dollars,组件的总重量为 55 kg。利用这些度量,系统设计人员可以更改整体设计以满足系统需求,然后再次分析系统。调整分析查看器中的属性值,然后重新运行分析,以优化设计,从而从成本和重量方面都达到可接受的解决方案。
参考
[1] Faisandier, Alan, and Rick Adcock. “Physical Architecture.” Guide to the Systems Engineering Body of Knowledge (SEBoK) v. 2.7, released October 31, 2022. https://sebokwiki.org/wiki/Physical_Architecture.
另请参阅
工具
对象
函数
iterate|instantiate|deleteInstance|update|refresh|save|loadInstance|lookup|getValue|setValue|hasValue