仿真车辆头灯管理的异步服务
此示例展示了如何在 System Composer™ 软件架构模型中使用异步服务来仿真车辆前大灯。
概述
在此示例中,模型 HeadlightArch 由一个照明管理器组件 LightingManager、两个前照灯组件 LeftHeadlight 和 RightHeadlight 以及一个记录组件 Logging 组成。前大灯组件被建模为同一引用模型 HeadLight 的两个不同实例。
引用的模型定义了两个 Simulink® 函数:
setMode函数接受lightMode变量作为输入,并返回一个输出值,指示前照灯是否损坏。getMode,该函数返回lightMode变量。
在照明管理器和两个头灯实例之间指定了一个单一的服务接口,这允许管理器调用 setMode 或 getMode 来获取引用头灯组件的特定实例。
打开模型。
model = systemcomposer.openModel("HeadlightArch");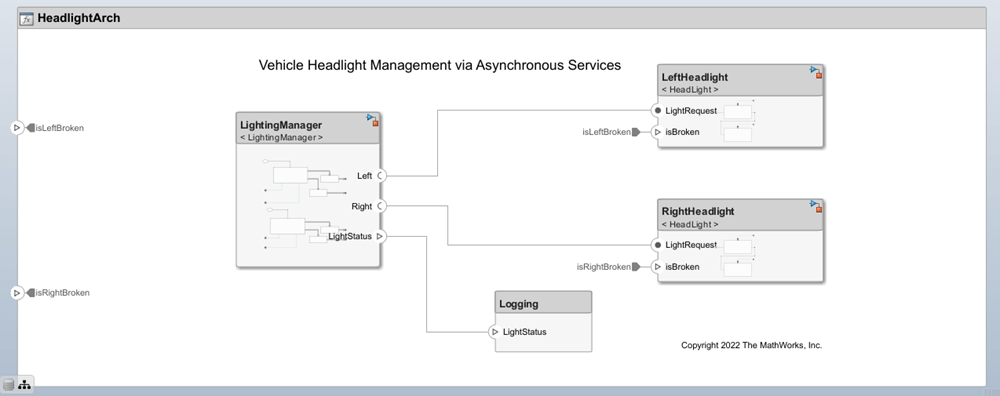
使用接口编辑器定义异步服务
要查看 接口编辑器,请在工具栏上导航至建模 > 接口编辑器。请注意,代表函数 getMode 和 setMode 的函数元素的异步复选框已选中。
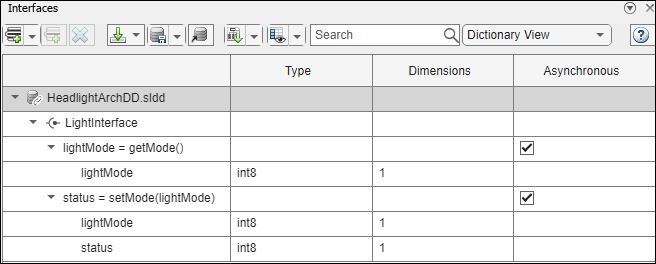
Simulink 行为模型的模块参数已预配置,以支持异步仿真。
在服务器模型中,选择 Simulink Function 模块中的 Trigger 模块参数异步执行函数调用,用于 setMode 和 getMode。在客户端模型上,选择模块参数 Function Caller 异步执行函数调用。
用于车辆前大灯仿真的异步函数调用
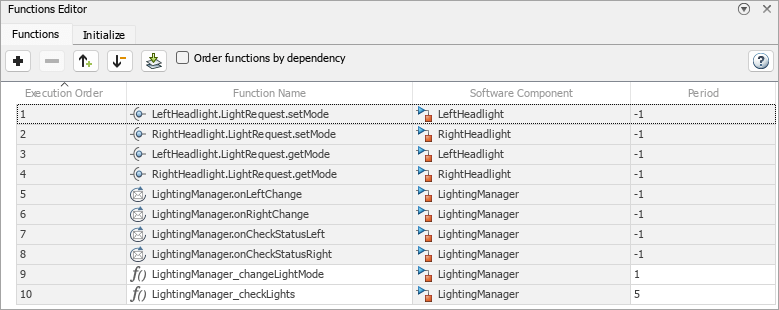
对于异步执行,当客户端向服务器发出请求时,服务器根据 函数编辑器 中定义的优先级顺序进行响应,而不是按照接收请求的顺序进行响应。要启动函数编辑器工具,请在工具栏上依次点击建模 > 函数编辑器。
使用函数编辑器工具更改函数的执行顺序,以便在同时调用这些函数时,优先级较高的函数先执行。
如果列表中的一个函数调用另一个函数:
如果优先级较低的函数已经在运行,则优先级较高的函数运行。完成后,优先级较低的函数继续运行。
如果已经运行了一个优先级较高的函数,则优先级较低的函数在优先级较高的函数之后运行。
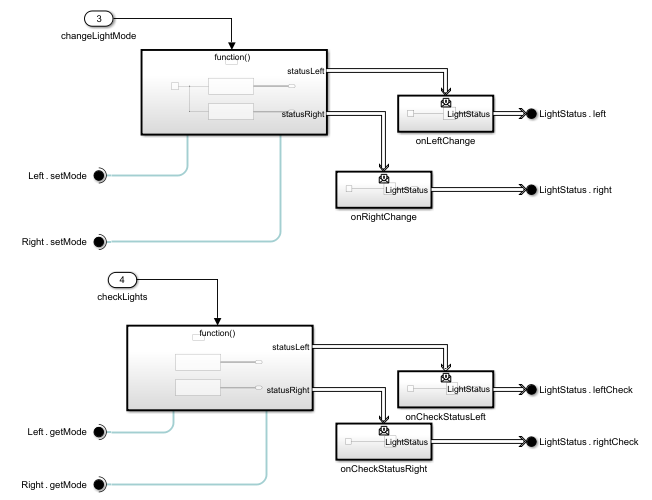
对于异步函数调用,Function Caller 模块具有与输出参量数一致的消息输出端口。此消息输出端口连接到 Message Triggered Subsystem 模块以处理消息。LightingManager 组件引用了由两个异步函数调用组成的 LightingManager Simulink 模型。changelLightMode Function-Call Subsystem 模块使用 setMode 函数,确定每个前大灯应如何更改照明模式。checkLight Function-Call Subsystem 模块使用 getMode 函数检查每个前大灯是否损坏,并返回其状态。
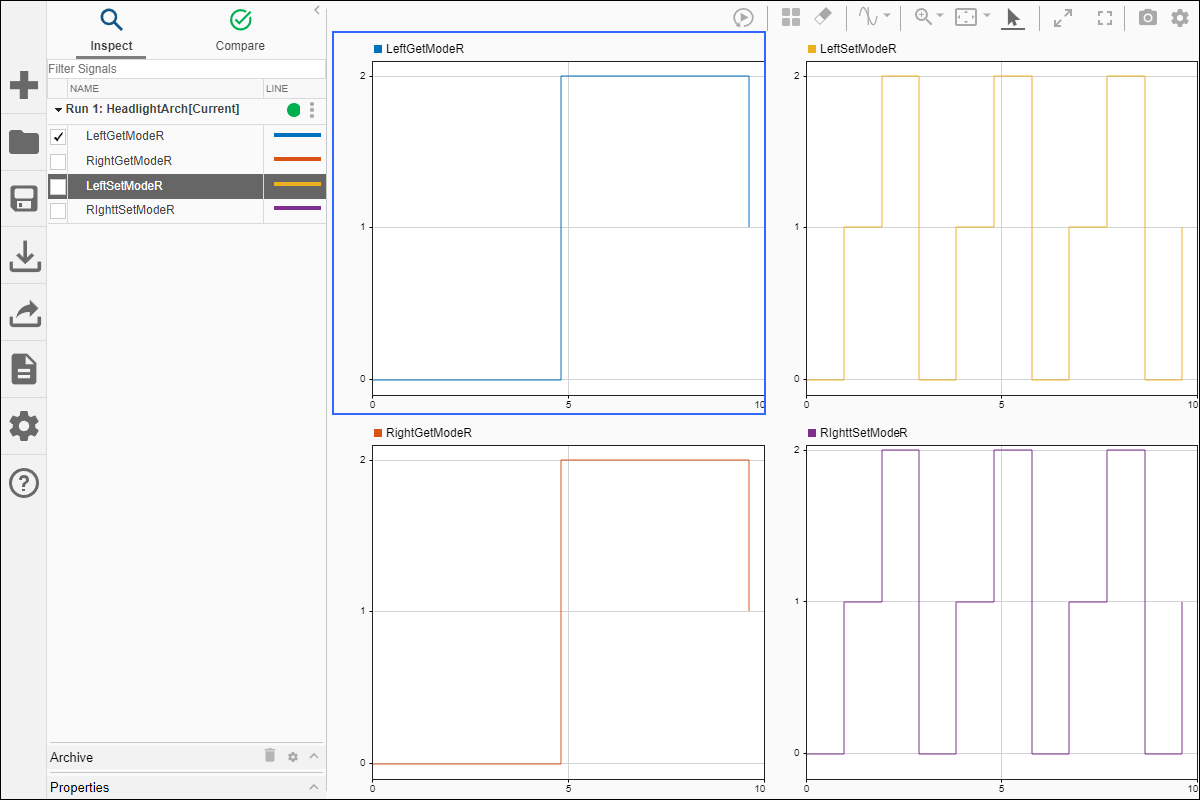
仿真模型。
sim("HeadlightArch");使用 仿真数据检查器,您可以在仿真后可视化记录的信号。在工具栏上,依次点击仿真 > 数据检查器。
要查看函数调用的执行顺序,在工具栏上,导航至仿真 > 序列查看器,启动 序列查看器。再次仿真模型,查看序列查看器上记录的消息以及消息的执行顺序。由于函数 setMode 在函数编辑器上的优先级更高,因此这些服务器调用将首先被接收。
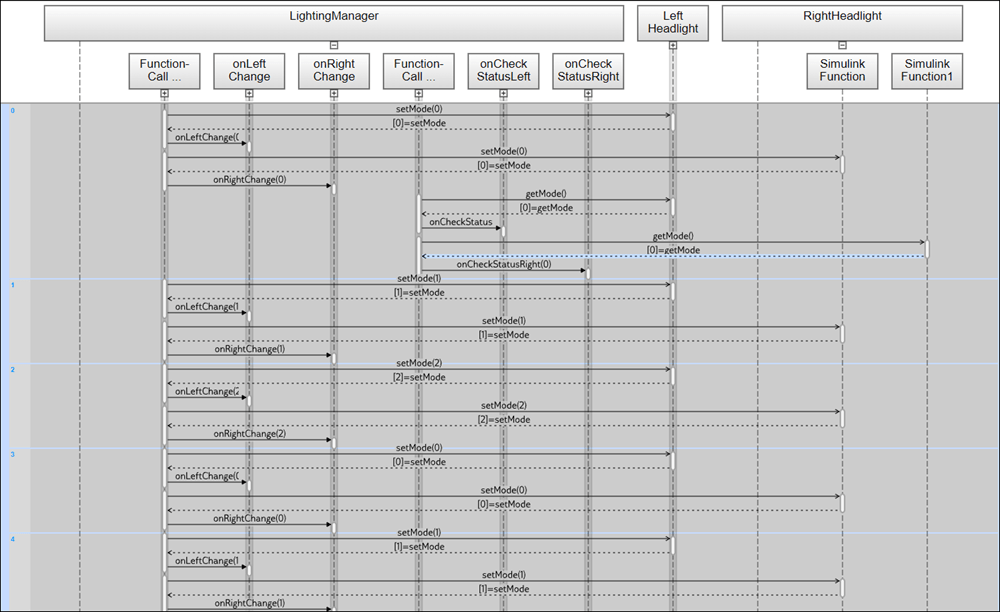
您可以在函数编辑器中更改函数的优先级顺序,并在序列查看器中查看结果。
另请参阅
模块
- Function Element | Function Element Call | Simulink Function | Function Caller | Function-Call Subsystem | Message Triggered Subsystem