C28x Hardware Interrupt
C28x 处理器上处理硬件中断的中断服务程序
库:
C2000 Microcontroller Blockset /
Scheduling
描述
基于定时器中断的执行调度模型无法满足某些实时应用对响应外部事件的要求。C28x Hardware Interrupt 模块通过允许异步处理由 C28x DSP 芯片支持库中其他模块管理的事件所触发的中断,解决了这一问题。
当 C28x Hardware Interrupt 模块启用外部中断选择功能时,该选择将激活所选通用 I/O 引脚的中断功能。要配置这些引脚,请参阅配置参数 > 硬件实现 > Hardware board settings > Target hardware resources > External Interrupt窗格。有关更多信息,请参阅Model Configuration Parameters for Texas Instruments C2000 Processors。
任务优先级表示与异步中断相关联的任务的相对重要性。该字段中的最低值代表最高优先级。基础速率任务的默认优先级值为 40,因此每个异步触发任务的优先级值必须小于 40(以配置为更高优先级),这些任务才能抢占基础速率任务。
抢占标志位决定了给定中断是否可被抢占。抢占机制优先于优先级机制。若中断触发了更高优先级的任务,而较低优先级的任务正在运行,则较低优先级任务的执行可被暂停,并在较高优先级任务完成后恢复。前提是该较低优先级任务已被配置为可抢占。
向量化输出
该模块的输出是一个函数调用。函数调用行的长度等于该模块设置为处理的中断数量.每个中断由模块对话框中显示的四个参数表示。这些参数是一组四个等长向量。每个中断由每个参数中的一个元素表示(共四个元素),这些向量中相同位置的元素各取一个。
每个中断由以下内容描述:
CPU 中断编号
外围中断扩展 (PIE) 中断编号
任务优先级
抢占标志
示例
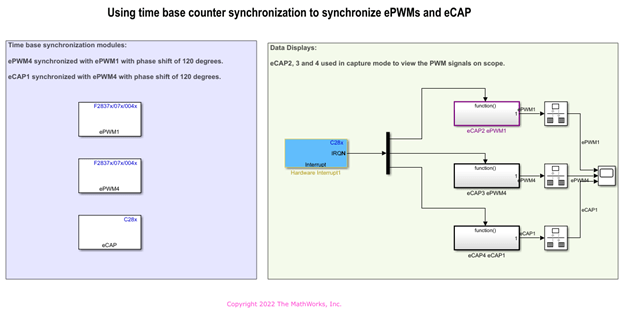
利用时基计数器同步实现 ePWM 和 eCAP 模块的同步
本示例展示了如何在 C2000™ Microcontroller Blockset 中使用时基计数器同步。

利用 ADC 中断实现 ADC-PWM 同步
本示例展示了如何使用 ADC 模块对模拟电压进行采样,以及如何使用 PWM 模块生成脉冲波形。本示例还展示了如何使用 Hardware Interrupt 模块将 PWM 占空比的变化与电压的模数转换同步。在生成的代码中,ADC 输入电压的变化会改变 PWM 输出的占空比。PWM 波形的周期保持不变。
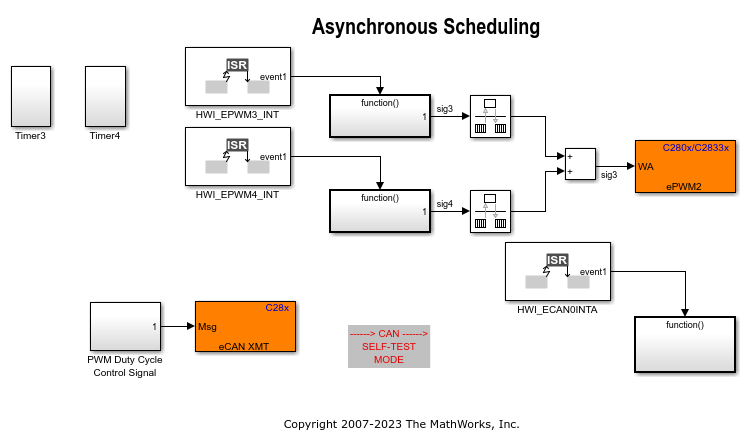
异步调度
本示例展示了如何使用 Texas Instruments™ C28x™ 外设和 Hardware Interrupt 模块以异步方式控制 Simulink® 函数调用子系统的实时执行。

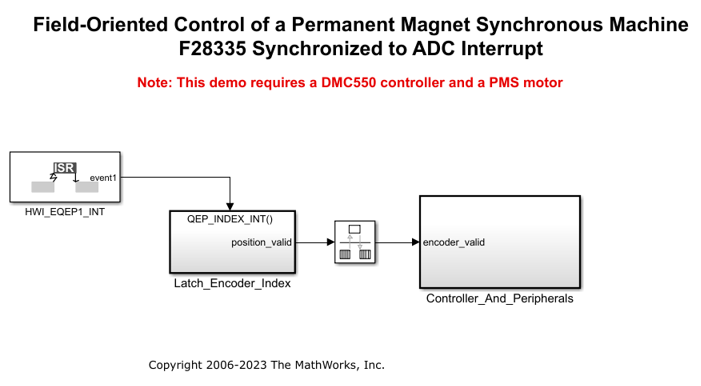
基于 C2000 处理器的正交编码器永磁同步电机磁场定向控制
本例采用磁场定向控制 (FOC) 技术来控制三相永磁同步电机 (PMSM) 的速度。FOC 算法需要转子位置反馈,该反馈由正交编码器传感器获得。有关 FOC 的详细信息,请参阅磁场定向控制 (Motor Control Blockset)。

使用 Solar Explorer 套件的带 MPPT 功能的光伏逆变器
本示例展示了如何使用 C2000™ Microcontroller Blockset 实现光伏 (PV) 逆变器系统。该示例使用 Texas Instruments太阳能探索套件以及 Texas Instruments F28035 控制卡。
端口
输入
输出
参数
版本历史记录
在 R2016b 中推出