Deploy PX4 on Host Computer with PX4 Host Target (PX4 Software-in-the-loop or SITL)
Learn how to deploy PX4 on host computer with PX4 Host Target (PX4 Software-in-the-loop or SITL) and control the vehicle.
Featured Examples
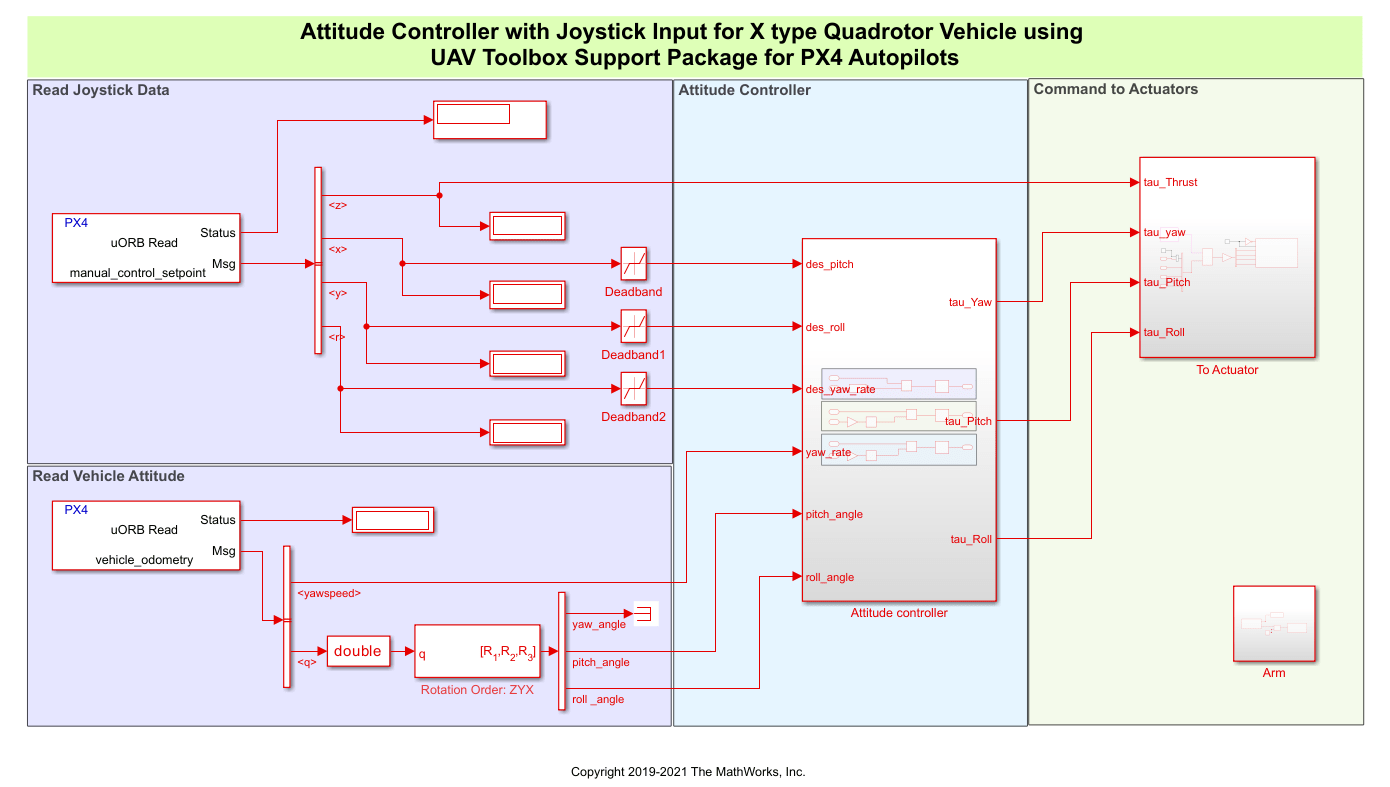
Attitude Control for X-Configuration Quadcopter Using External Input
Use the UAV Toolbox Support Package for PX4® Autopilots to design an attitude controller for an X-configuration quadcopter that uses input from a joystick or radio control transmitter. In this example, you also verify the controller design using PX4 Host Target and SIH in Host Target simulator.
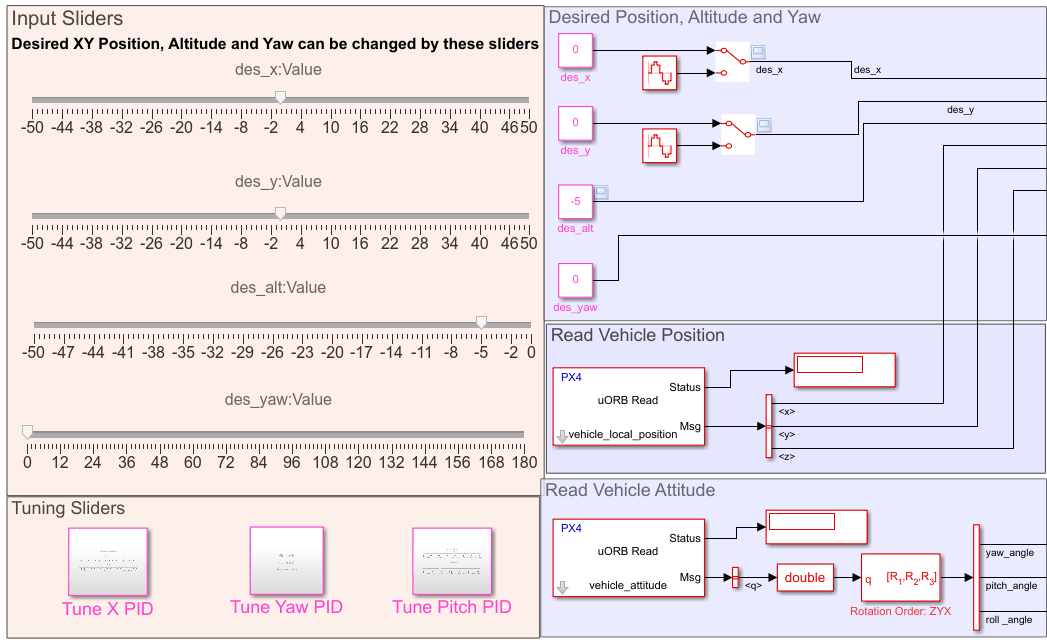
Position Tracking for X-Configuration Quadcopter
Use the UAV Toolbox Support Package for PX4® Autopilots to design a position controller for an X-configuration quadcopter. In this example, you also verify the controller design using the PX4 Host Target and jMAVSim simulator.
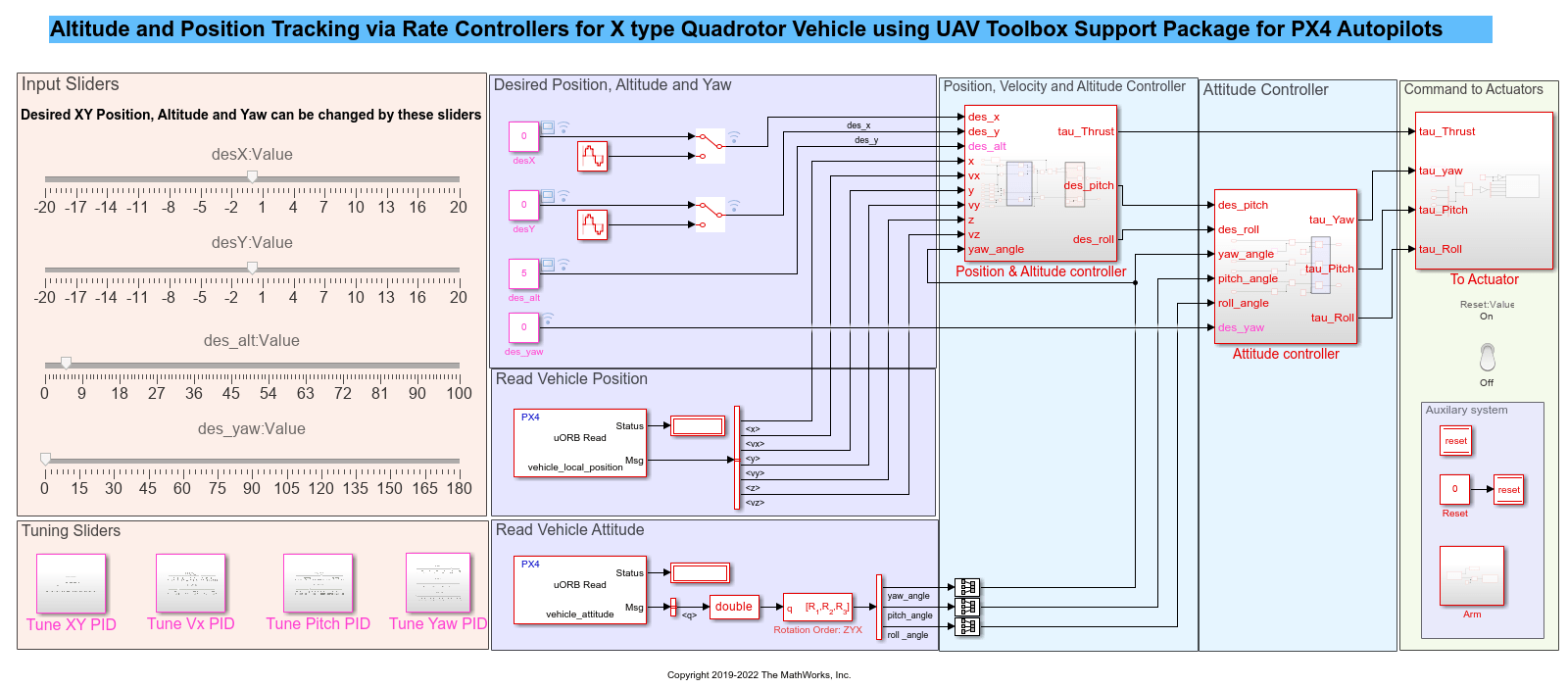
Position Tracking for X-Configuration Quadcopter Using Rate Controller
Use the UAV Toolbox Support Package for PX4® Autopilots to design a position controller using rate control for an X-configuration quadcopter. In this example, you also verify the controller design using the PX4 Host Target and jMAVSim simulator.
Monitor and Tune PX4 Host Target Flight Controller with Simulink-Based Plant Model
Use the UAV Toolbox Support Package for PX4 Autopilots to verify the controller design using PX4 Host Target versus the simulator designed in Simulink®.

Simulate Manual Control for Fixed-Wing with PX4 Host Target
Use the UAV Toolbox Support Package for PX4® Autopilots to take manual control inputs from Joystick / RC Transmitter and control the fixed-wing flight.

Visualize 3D Scenarios in Unreal Engine with PX4 Host Target Simulation
Use the UAV Toolbox Support Package for PX4® Autopilots to demonstrate 3D scenario Simulation with PX4 Host Target Simulation. For visualization, you can use this example model along with other models running in Simulation-In-Hardware (SIH) . This example is compatible with all existing SITL examples.