Hardware-in-the-loop Simulation (HITL) with PX4
Learn to work with Hardware-in-the-loop Simulation (HITL) with PX4. These topics helps you to know HITL architecture, physical connections, and set up HITL.
Topics
VTOL UAV Controller Template Deployment
- PX4 Hardware-in-the-Loop (HITL) Simulation and Visualization with VTOL UAV
Use PX4 HITL simulation and Unreal Engine to verify your VTOL UAV control design.
Featured Examples
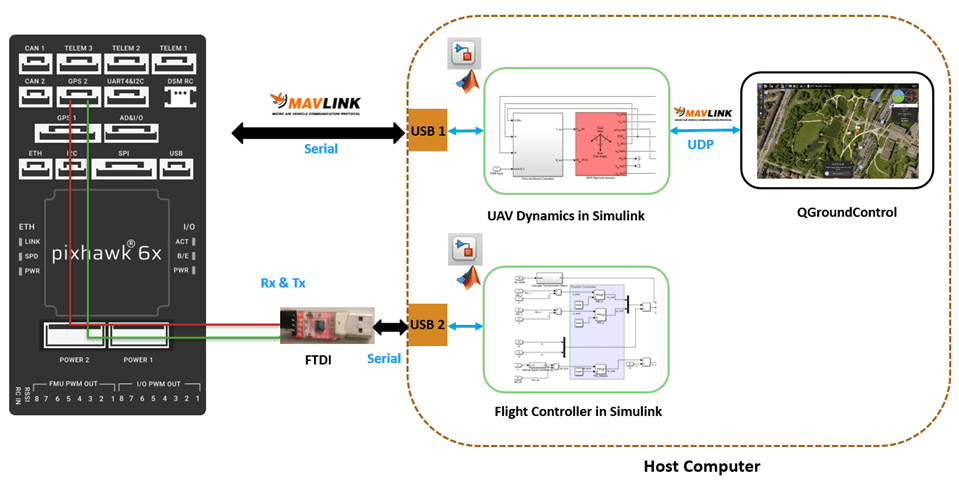
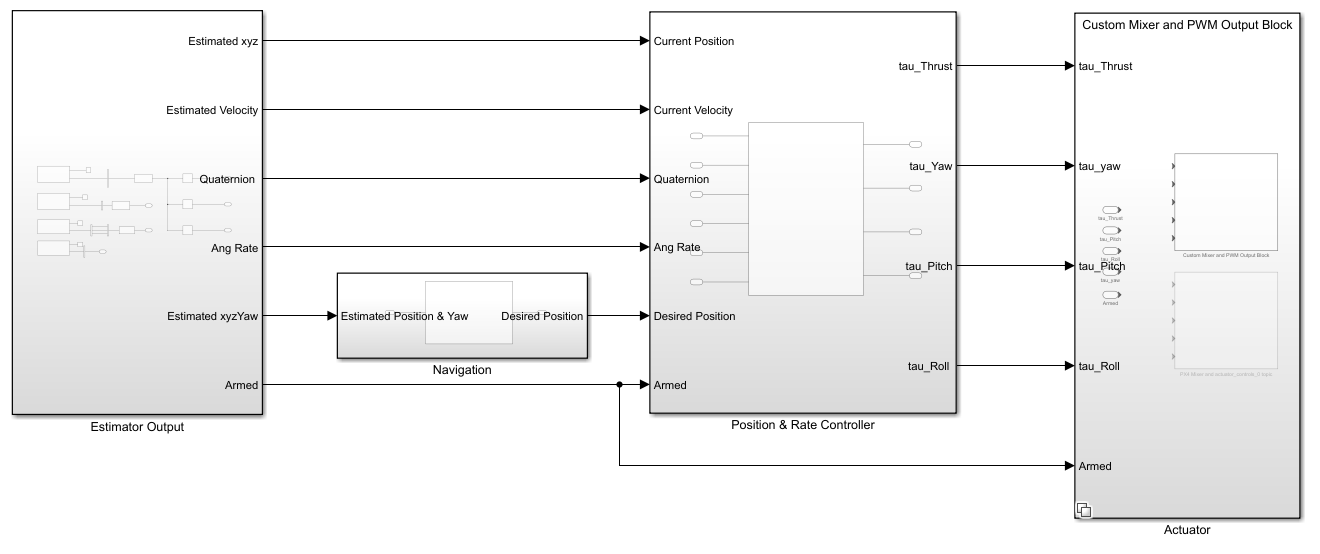
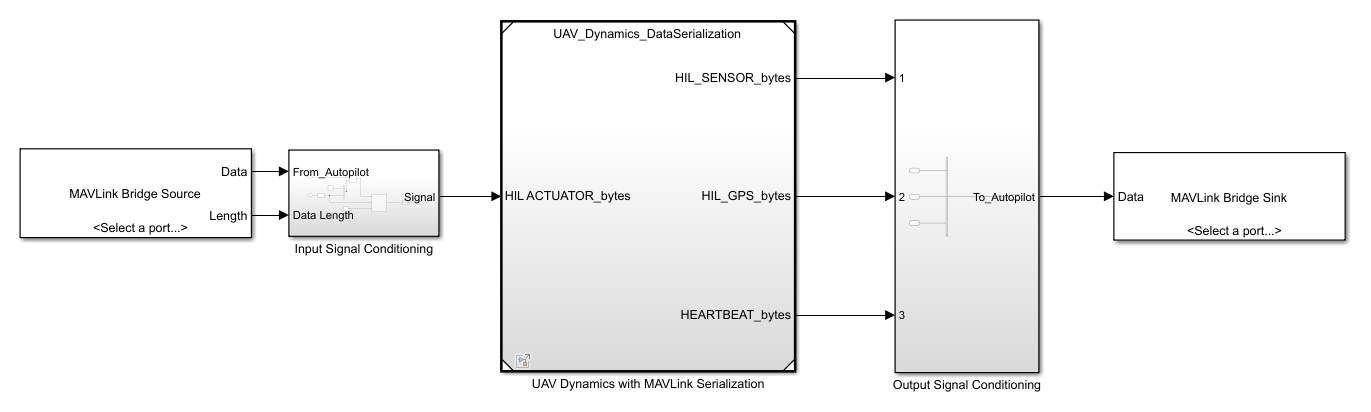
PX4 Autopilot in Hardware-in-the-Loop (HITL) Simulation with UAV Dynamics in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to verify the controller design by deploying on the Pixhawk® hardware board, in HITL mode with UAV Dynamics contained in Simulink®.

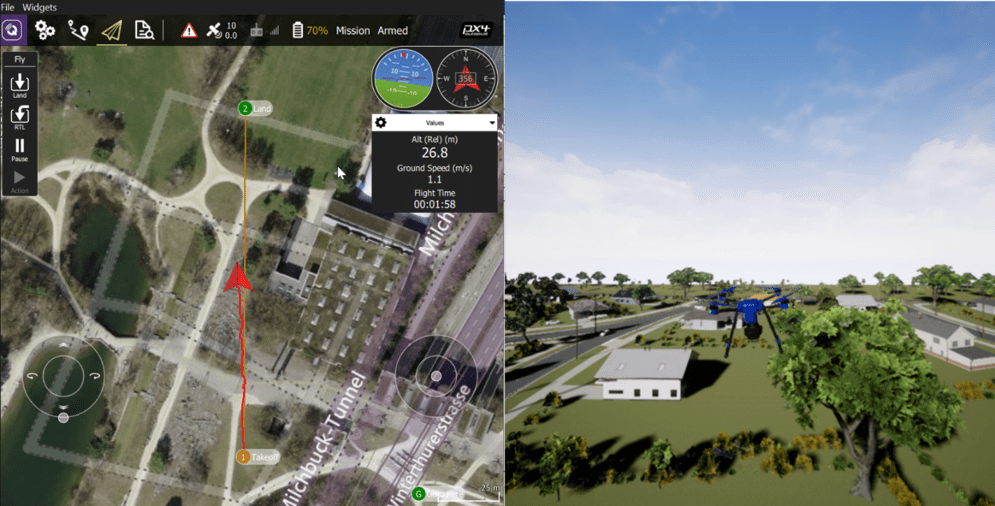
Scenario Simulation and Flight Visualization with PX4 Hardware-in-the-Loop (HITL) and UAV Dynamics in Simulink
Demonstrates 3D scenario Simulation and Flight visualization with PX4® Hardware-in-the-Loop (HITL) and UAV Dynamics contained in Simulink®. Unreal Engine® simulation environment is used for the 3D scenario Simulation and visualization. For more information, see Unreal Engine Simulation for Unmanned Aerial Vehicles.

PX4 Autopilot and NVIDIA Jetson in Hardware-in-the-Loop (HITL) Simulation with UAV Dynamics Modeled in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to verify an autonomous algorithm deployed on NVIDIA® Jetson™ as Onboard Computer along with Pixhawk® hardware board, in HITL mode with UAV Dynamics contained in Simulink®.
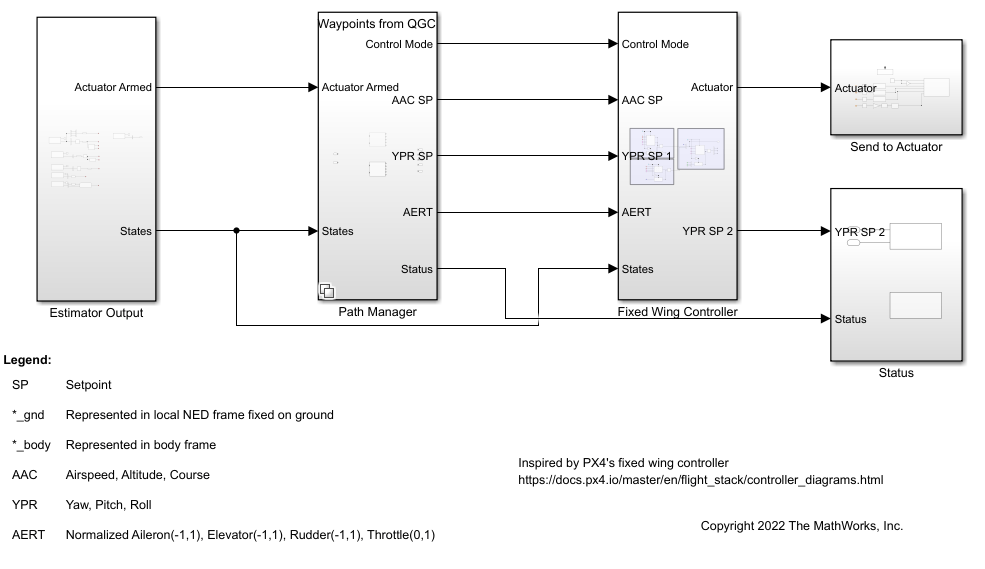
PX4 Hardware-in-the-Loop (HITL) Simulation with Fixed-Wing Plant in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to verify the controller design by deploying the design on the PX4 Autopilot hardware board. This is done in HITL mode with fixed-wing UAV Dynamics contained in Simulink®.
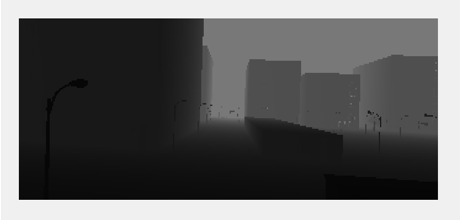
Obstacle Avoidance in NVIDIA Jetson with PX4 Autopilot in Hardware-in-the-Loop (HITL) Simulation with UAV Dynamics Modeled in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to verify an Obstacle avoidance algorithm deployed on NVIDIA® Jetson™ as Onboard Computer along with Pixhawk® hardware board, in HITL mode and the UAV Dynamics contained in Simulink®.
UVify IFO-S Autopilot and Nvidia Jetson Hardware-in-the-Loop (HITL) Simulation in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to deploy and verify algorithms on UVify IFO-S Drone, with NVIDIA® Jetson™ as Onboard computer.
PX4 Autopilot in Hardware-in-the-Loop (HITL) Simulation with Speedgoat in Simulink
How you the use the UAV Toolbox Support Package for PX4® Autopilots to deploy a quadcopter plant dynamics model into Speedgoat Real-Time target machine and perform hardware-in-the-loop simulation. Additionally, you can validate your control logic running on PX4 Autopilot against nominal and adverse conditions such as sensor failures.
PX4 Stock Autopilot in HITL Simulation with UAV Dynamics modeled in Simulink
Use the UAV Toolbox Support Package for PX4® Autopilots to design UAV Dynamics in Simulink and verify them by using the PX4 Stock Autopilot in HITL mode.