Simulation 3D Custom UAV Pack
Libraries:
UAV Toolbox /
Simulation 3D
Description
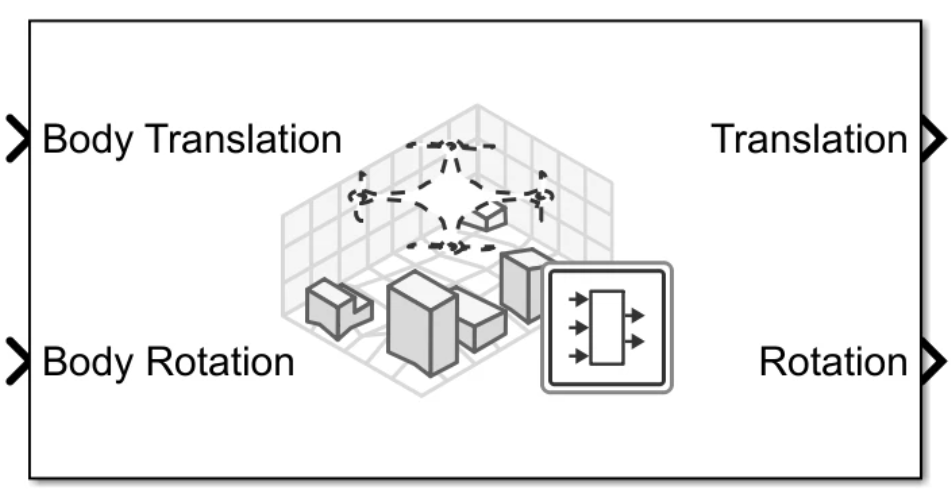
The Simulation 3D Custom UAV Pack block generates translation and rotation input for the
Simulation 3D UAV
Vehicle block with Type set to Custom.
Examples
Open the tiltRotorUAVModel.slx Simulink® model.
open_system("tiltRotorUAVModel")
This model uses the Simulation 3D UAV Vehicle block to simulate a custom Hexarotor UAV in 3D environment. The Type parameter is specified to Custom, and the Path to custom mesh is specified to /MathWorksUAVContent/UAVs/HexaRotorUAV/HexaRotor.HexaRotor.

This model uses the Simulation 3D Custom UAV Pack block to generate the translation and rotation inputs. The block is configured to accept the body translation, body rotation, tilt angles for motors 1 to 6, and angular velocities of rotors 1 to 6.

The Hexarotor custom mesh is configured with the bone hierarchy that is shown in the following image. For more details on how to configure custom UAV mesh for simulation in Unreal Engine, visit Prepare Custom UAV Vehicle Mesh for Unreal Engine Scenario Simulation.
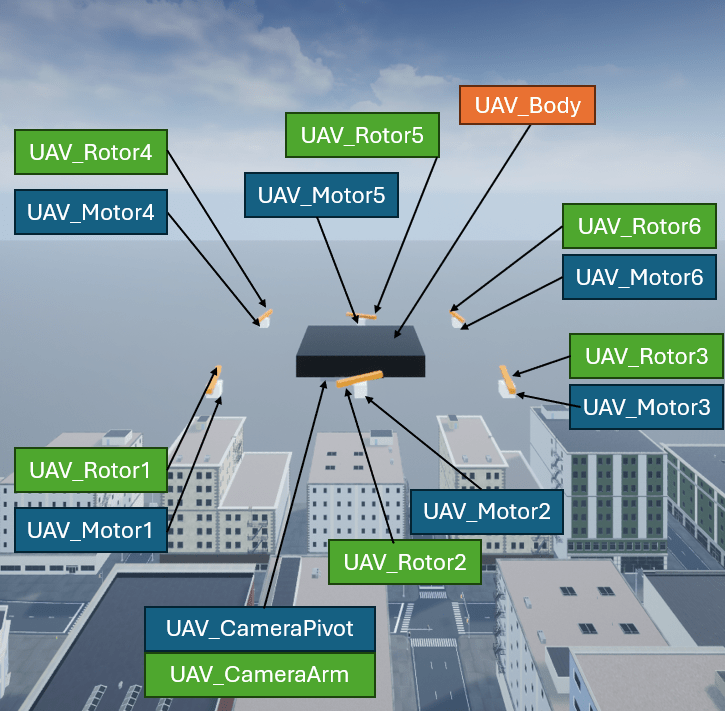
In this example, the Hexarotor UAV is configured with the following input:
UAV_Body rotation angle — 0 radian of roll, pitch, and yaw angles.
UAV_Motor1 tilt angle — 0 radian.
UAV_Rotor1 angular velocity — 250 RPM, clockwise.
UAV_Motor2 tilt angle — pi/2 radian, oscillating at a rate of 1 rad/s.
UAV_Rotor2 angular velocity — 60 RPM, clockwise.
UAV_Motor3 tilt angle — 0 radian.
UAV_Rotor3 angular velocity — 250 RPM, counter-clockwise.
UAV_Motor4 tilt angle — 0 radian.
UAV_Rotor4 angular velocity — 250 RPM, counter-clockwise.
UAV_Motor5 tilt angle — pi/2 radian, oscillating at a rate of 1 rad/s.
UAV_Rotor5 angular velocity — 60 RPM, counter-clockwise.
UAV_Motor6 tilt angle — 0 radian.
UAV_Rotor6 angular velocity — 250 RPM, clockwise.
Run the tiltRotorUAVModel.slx Simulink model to start the simulation.
You can also run this example with an Octarotor UAV mesh by specifying the Path to custom mesh parameter of the Simulation 3D UAV Vehicle block as /MathWorksUAVContent/UAVs/OctaRotorUAV/OctaRotor.OctaRotor and running the model again.
Ports
Input
Output
Parameters
Version History
Introduced in R2026a