Scenario Simulation
UAV Toolbox provides two simulation environments in which to test UAV algorithms.
The Unreal Engine simulation environment (requires Simulink® 3D Animation™) renders scenarios using the Unreal Engine from Epic Games®. Use this environment to visualize scenarios using more realistic graphics and to generate high-fidelity ultrasonic, camera, and lidar sensor data. This environment is available in Simulink, and runs on Windows® and Linux® only. To learn more, see Unreal Engine Simulation for Unmanned Aerial Vehicles.
The cuboid simulation environment, UAVs, terrain, and buildings as polygon meshes. Use this environment to rapidly author scenarios or generate sensor data. Test controllers, tracking algorithms, and sensor fusion algorithms in both MATLAB® and Simulink. To get started authoring a scenario, use the
uavScenarioobject.
Categories
- Unreal Engine Scenario Simulation
Visualize UAV scenarios with realistic graphics and generate high-fidelity sensor data with Unreal Engine
- Cuboid Scenario Simulation
Rapidly author UAV scenarios, generate low-fidelity sensor data, and test algorithms in a simplified simulation environment
Featured Examples

UAV Package Delivery
Simulate a small multicopter simulation taking off, flying, and landing in a city environment.
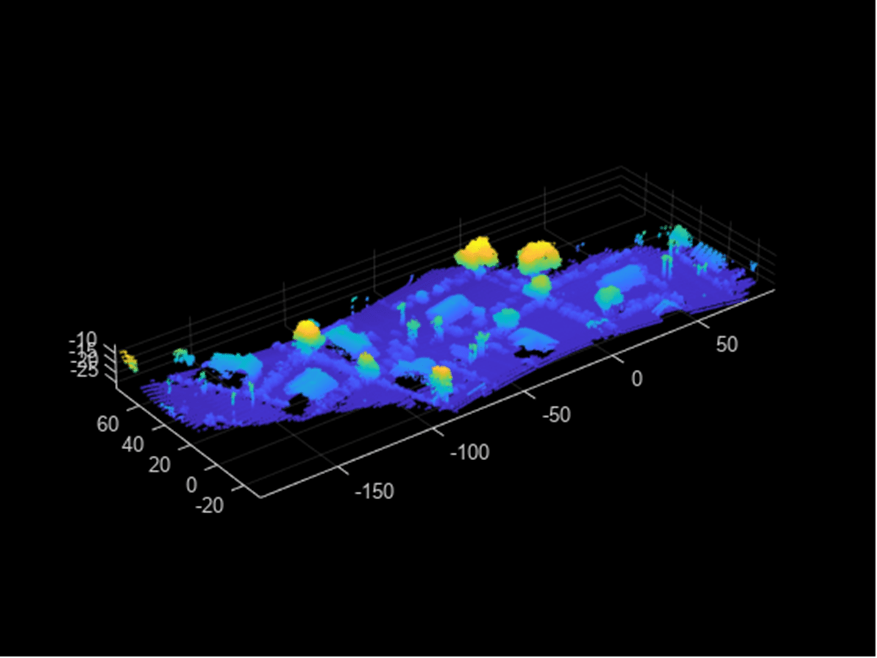
Simulate Safe Landing of UAV in Unexplored Environment Using Unreal Engine
Simulate the safe landing operation of a UAV in an unexplored environment.
Simulate GNSS Multipath Effects on UAV Flying in Urban Environment
Simulate GNSS Multipath for a UAV with a GPS receiver flying in an urban-canyon like environment and visualize satellite visibility.
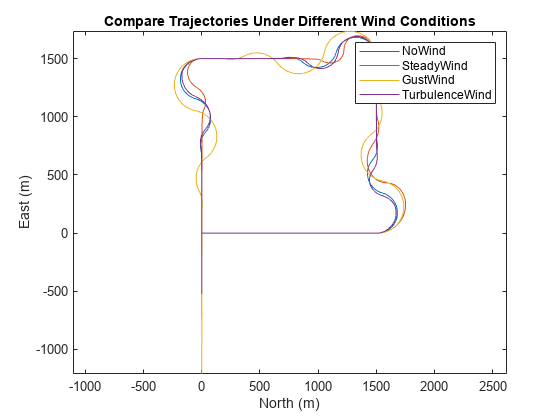
Simulate UAV Waypoint Following with Different Wind Conditions
Create a UAV scenario with different wind conditions, and use it in Simulink® to simulate a fixed-wing UAV following waypoints.