terrainHeight
Returns terrain height in UAV scenarios
Description
heights = terrainHeight(scene,x,y)uavScenario
object.
heights = terrainHeight(___,Name,Value)Name in quotes.
Examples
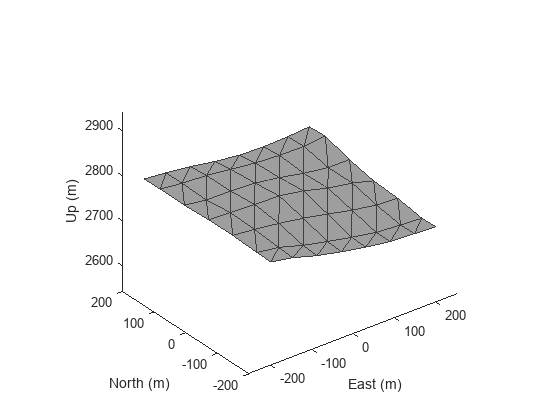
Add Terrain Mesh to UAV Scenario
Create a UAV scenario with a specified reference location.
scenario = uavScenario(ReferenceLocation=[39.5 -105.5 0]);
Add custom terrain data from the n39_w106_3arc_v2.dt1 DTED file.
addCustomTerrain("CustomTerrain","n39_w106_3arc_v2.dt1");
Add the terrain mesh to the UAV scenario.
addMesh(scenario,"terrain",{"CustomTerrain",[-200 200],[-200 200]},[0.6 0.6 0.6]);
Show the UAV scenario.
show3D(scenario);
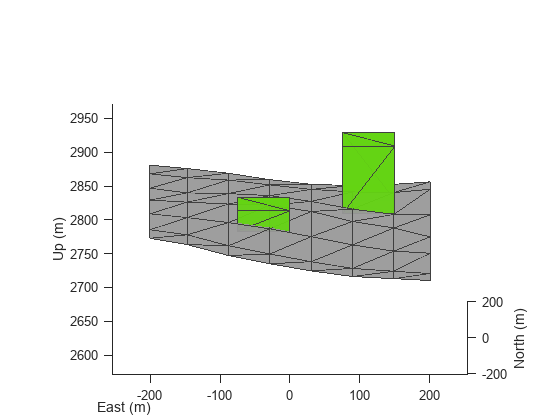
Add Building Mesh to UAV Scenario
Specify the building mesh centers, heights, and boundaries.
Tip: Use the terrainHeight function to obtain ground height for each build base.
buildingCenters = [-50 -50;100 100]; buildingHeights = [30 100]; buildingBoundary = [-25 -25; -25 50; 50 50; 50 -25];
Add the building mesh to the UAV scenario.
for idx = 1:size(buildingCenters,1) buildingVertices = buildingBoundary+buildingCenters(idx,:); buildingBase = min(terrainHeight(scenario,buildingVertices(:,1),buildingVertices(:,2))); addMesh(scenario,"polygon",{buildingVertices,buildingBase+[0 buildingHeights(idx)]},[0.3922 0.8314 0.0745]); end
Show the UAV scenario.
show3D(scenario); view([0 15])
Remove Custom Terrain
Remove the custom terrain that was imported.
removeCustomTerrain("CustomTerrain")Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2021a
See Also
uavScenario | addMesh | addCustomTerrain | removeCustomTerrain