uavWindGust
Description
The uavWindGust object generates a wind gust of the standard
“1-cosine” shape for a UAV platform. For more information on the gust shape, see 1-Cosine Gust Shape. To simulate a wind gust in a
UAV scenario:
Create the
uavWindGustobject and set its properties.Attach the wind model to a UAV platform by using the
addWindfunction.Obtain the wind velocity from the UAV scenario by using the
windVelocityfunction while the UAV scenario is running.
Note
Simulating a UAV scenario that contains a uavWindGust object requires
Aerospace Toolbox.
Creation
Description
gustWind = uavWindGust
gustWind = uavWindGust(Name=Value)uavWindGust(StartTime=10) sets the wind start time to 10
seconds.
Properties
Examples
Create a UAV scenario with default properties.
scene = uavScenario;
Create a UAV platform. Specify a trajectory to fly the platform 80 meters north of the scenario origin in 80 seconds.
distance = 80;
duration = 80;
platformTrajectory = waypointTrajectory([0 0 -50; distance 0 -50],[0 duration]);
platform = uavPlatform("UAV",scene,Trajectory=platformTrajectory);Create a wind gust object. Specify the amplitude as 5 m/s on the *z-*axis, with a gust length of 80 meters. Add the wind object to the UAV platform.
gustWind = uavWindGust(GustAmplitude=[0 0 5],GustLength=[80 80 80]); addWind(platform,gustWind)
Set up the scenario.
setup(scene) % initialize arrays of zeros to store the vertical wind velocity and x-position of the UAV wv = zeros(scene.UpdateRate*duration,1); xpos = zeros(scene.UpdateRate*duration,1); % Start a counter index idx = 1;
Run the scenario. Obtain the vertical wind velocity at each time step.
while scene.CurrentTime <= duration % Obtain resultant wind velocity vel = windVelocity(platform); % Obtain UAV position [motion,lla] = read(platform); % Obtain UAV x-position xpos(idx) = motion(1); % Obtain vertical wind velocity wv(idx) = vel(3); % Increment counter index idx = idx + 1; % Advance the scenario time step advance(scene); end
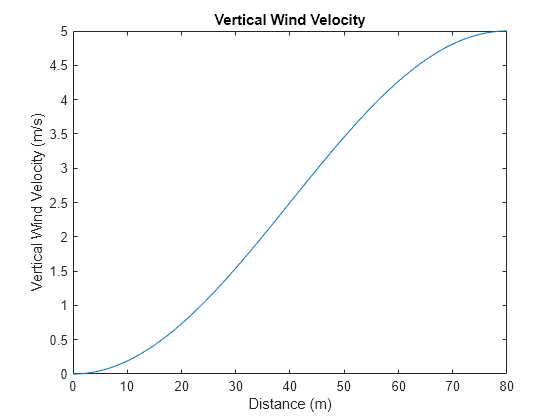
Plot the vertical wind velocity against distance.
plot(xpos,wv) title("Vertical Wind Velocity") xlabel("Distance (m)") ylabel("Vertical Wind Velocity (m/s)")
More About
This figure shows the shape of a gust with a start time of zero. This diagram shows the impact of gust length and gust amplitude on the shape of the gust.
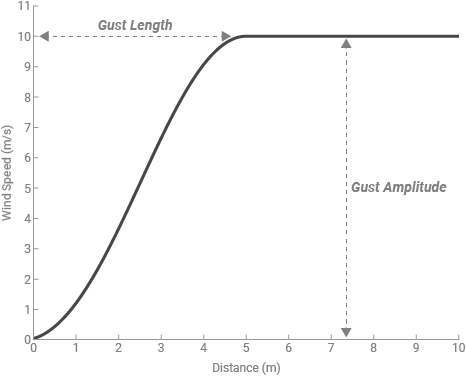
To assess the response of a UAV to large wind disturbances, you can use one or more discrete gust objects for a single platform.
The mathematical representation of the discrete gust is:
where Vm is the gust amplitude, dm is the gust length, x is the distance traveled, and Vwind is the resultant wind velocity in the UAV platform body frame.
Version History
Introduced in R2024a