ZalaZONE Automotive Proving Ground Hill Tracks
Climbs with varying gradients 3D environment
Since R2024b
Description
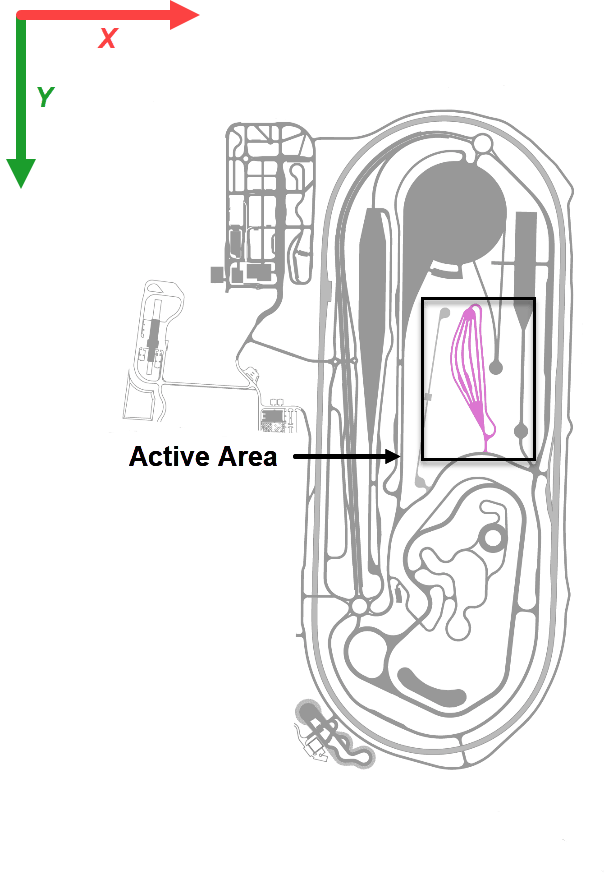
The ZalaZONE Automotive Proving Ground Hill Tracks scene is a 3D environment of the Hill Tracks module from the ZalaZONE Automotive Proving Grounds. This environment provides five different climbs with gradients varying between 5% and 30%, with an additional separated return route. This scene is intended for validation simulation of maneuvers under difficult conditions such as starting or stopping on slopes or ascents with different speeds, accelerating, or decelerating.
For information about additional scenes, see 3D Scenes for Simulation in Unreal Engine Environment.

Setup
To simulate a driving maneuver in the ZalaZONE Hill Tracks
scene:
Add a Simulation 3D Scene Configuration block to your Simulink® model.
In this block, set the Scene source parameter to
Default Scenes.View the currently available scenes in the Scene name parameter. If the scene is not available, you must install it.
To install the scene:
Click Install.
In the Add-on installer dialog box, select the scene.
Click Next and follow the prompts.
MATLAB® restarts after the scene is installed.
Select the scene name from the Scene name parameter.
Layout
| Overall | Active Area |
|---|---|
|
|
|
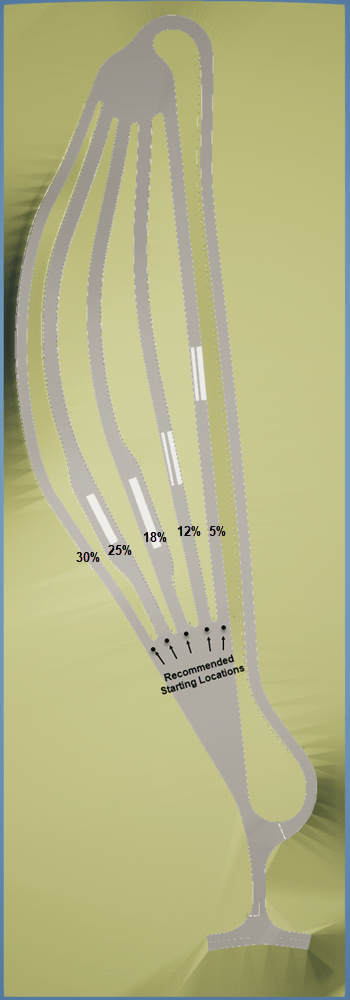
This table provides the recommended starting locations for the vehicle in the world coordinate system. Dimensions are in m and deg.

Grade | X (m) | Y (m) | Z (m) | Roll (deg) | Pitch (deg) | Yaw (deg) |
|---|---|---|---|---|---|---|
30% |
|
|
|
|
|
|
25% |
|
|
|
|
|
|
18% |
|
|
|
|
|
|
12% |
|
|
|
|
|
|
5% |
|
|
|
|
|
|
Tips
If you have the Vehicle Dynamics Blockset™ Interface for Unreal Engine® Projects support package, then you can modify this scene. Enable the
MathWorksAutomotiveContentplugin to use the scene in Unreal Engine projects. The scene name in the plugin isZalaZONEHillTracks.For more details on customizing scenes, see Customize 3D Scenes for Vehicle Dynamics Simulations.
References
[1] Szalay, Zsolt. "Critical Scenario Identification Concept: The Role of the Scenario-in-the-Loop Approach in Future Automotive Testing." IEEE Access 11 (July 2023): 82464–76. https://doi.org/10.1109/ACCESS.2023.3298875.
[2] Duleba, Szabolcs, Tamás Tettamanti, Ádám Nyerges, and Zsolt Szalay. “Ranking the Key Areas for Autonomous Proving Ground Development Using Pareto Analytic Hierarchy Process." IEEE Access 9 (March 2021): 51214–30. https://doi.org/10.1109/ACCESS.2021.3064448.
[3] Somogyi, Árpád, Tamás Tettamanti, Pál Varga, Zsolt Szalay, Dániel Baranyai, and Tamás Lovas. "Digital Map Generation Workflow Demonstrated on ZalaZONE Automotive Proving Ground Elements." NOMS 2023-2023 IEEE/IFIP Network Operations and Management Symposium, Miami, FL, May 8-12, 2023: 1–6. https://doi.org/10.1109/NOMS56928.2023.10154403.
[4] Gangel, Kálmán, Zoltán Hamar, András Háry, Áron Horváth, Gábor Jandó, Balázs Könyves, Dániel Panker et al. "Modelling the ZalaZONE Proving Ground: A Benchmark of State-of-the-Art Automotive Simulators PreScan, IPG CarMaker, and VTD Vires." Acta Technica Jaurinensis 14, no. 4 (2021): 488–50.. https://doi.org/10.14513/actatechjaur.00606.