estimateGeometricTransform3D
(Not recommended) Estimate 3-D geometric transformation from matching point pairs
estimateGeometricTransform3D is not recommended. Use the
estgeotform3d function instead. For more information, see Version History.
Syntax
Description
tform = estimateGeometricTransform3D(matchedPoints1,matchedPoints2,transformType)matchedPoints1 to the inliers in the matched points
from the other set of 3-D points matchedPoints2.
[
additionally returns a vector specifying each matched point pair as either an
inlier or an outlier using the input arguments from the previous syntax.tform,inlierIndex]
= estimateGeometricTransform3D(___)
[
additionally returns a status code indicating whether or not the function could
estimate a transformation and, if not, why it failed. If you do not specify the
tform,inlierIndex,status] = estimateGeometricTransform3D(___)status output, the function instead returns an error
for conditions that cannot produce results.
[___] = estimateGeometricTransform3D(___,
specifies additional options using one or more name-value arguments in addition
to any combination of arguments from previous syntaxes. For example,
Name,Value)"Confidence",99 sets the confidence value for finding the
maximum number of inliers to 99.
Examples
Load a point cloud file into the workspace.
ptCloud1 = pcread('teapot.ply')ptCloud1 =
pointCloud with properties:
Location: [41472×3 single]
Count: 41472
XLimits: [-3 3.4340]
YLimits: [-2 2]
ZLimits: [0 3.1500]
Color: []
Normal: []
Intensity: []
ptCloud1 = pcdownsample(ptCloud1,'random',0.25); Create a rigid 3-D transformation object with a 30-degree rotation.
theta = 30; % degrees rot = [cosd(theta) sind(theta) 0; ... -sind(theta) cosd(theta) 0; ... 0 0 1]; trans = [0 0 0]; tform = rigid3d(rot,trans);
Transform the point cloud using the transformation object.
ptCloud2 = pctransform(ptCloud1,tform);
To introduce noise, add random points to both point clouds.
noise1 = rescale(rand(1000,3),-2,2); ptCloud1 = pointCloud([ptCloud1.Location;noise1]); noise2 = rescale(rand(1000,3),-2,2); ptCloud2 = pointCloud([ptCloud2.Location;noise2]);
Visualize the noisy point clouds.
figure
pcshowpair(ptCloud1,ptCloud2)
title('Point Clouds With Added Noise')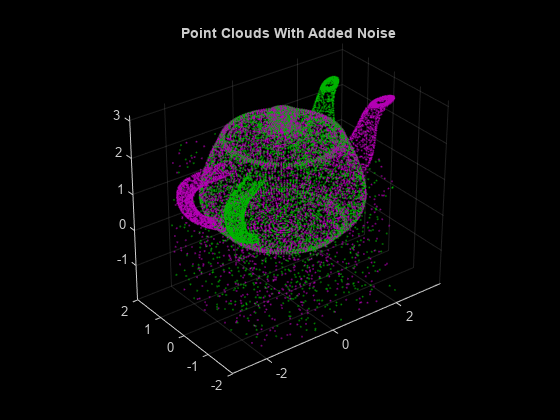
Extract matched points from the point clouds.
matchedPoints1 = ptCloud1.Location; matchedPoints2 = ptCloud2.Location;
Estimate the rigid transformation between the point clouds.
[tformEst,inlierIndex] = estimateGeometricTransform3D(matchedPoints1, ... matchedPoints2,'rigid');
Extract the inlier points.
inliersPtCloud1 = transformPointsForward(tformEst,matchedPoints1(inlierIndex,:)); inliersPtCloud2 = matchedPoints2(inlierIndex,:);
Visualize the inliers of the aligned point clouds.
figure
firstPtCloud = pointCloud(inliersPtCloud1);
secondPtCloud = pointCloud(inliersPtCloud2);
pcshowpair(firstPtCloud,secondPtCloud)
title('Aligned point clouds')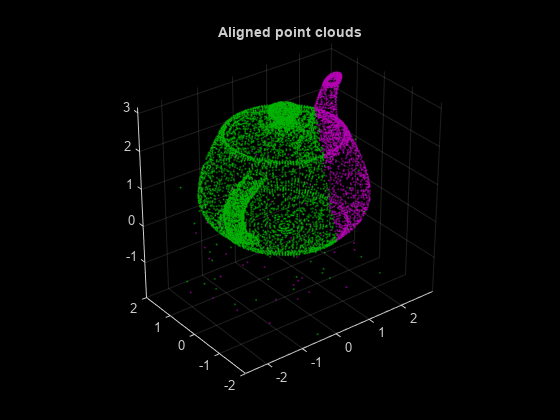
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: "Confidence",99 sets the confidence value for finding
the maximum number of inliers to 99.
Maximum number of random trials, specified as a positive integer. This value specifies the number of randomized attempts the function makes to find matching point pairs. Specifying a higher value causes the function to perform additional computations, which increases the likelihood of finding inliers.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Confidence of finding the maximum number of inliers, specified as a positive numeric scalar in the range (0, 100). Increasing this value causes the function to perform additional computations, which increases the likelihood of finding a greater number of inliers.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
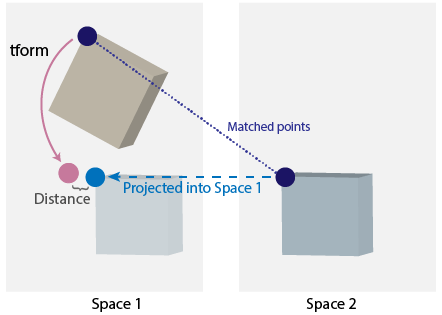
Maximum distance from a point to the projection of the corresponding
point, specified as a positive numeric scalar.
"MaxDistance" specifies the maximum distance,
in pixels, that a point can differ from the projected location of its
corresponding point to be considered an inlier. The corresponding
projection is based on the estimated transform.
The function checks for a transformation from
matchedPoints1 to
matchedPoints2, and then calculates the distance
between the matched points in each pair after applying the
transformation. If the distance between the matched points in a pair is
greater than the "MaxDistance" value, then the pair
is considered an outlier for that transformation. If the distance is
less than "MaxDistance", then the pair is
considered an inlier.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Output Arguments
Algorithms
The function excludes outliers using the M-estimator sample consensus (MSAC) algorithm. The MSAC algorithm is a variant of the random sample consensus (RANSAC) algorithm. Results may not be identical between runs due to the randomized nature of the MSAC algorithm.
References
[1]
[2]