2-D and 3-D Geometric Transformation Process Overview
To perform a 2-D or 3-D geometric transformation, first create a geometric transformation
object that stores information about the transformation. Then, pass the image to be
transformed and the geometric transformation object to the imwarp function. You optionally can provide spatial referencing information
about the input image to imwarp.
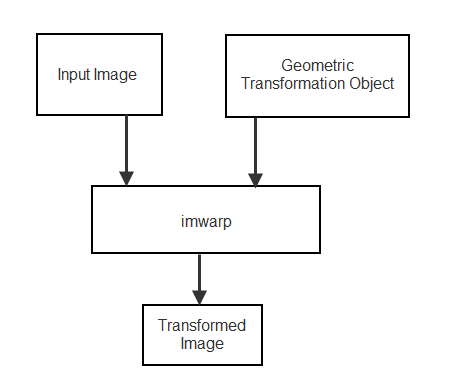
imwarp uses the geometric transformation to map coordinates in the
output image to the corresponding coordinates in the input image (inverse mapping). Then,
imwarp uses the coordinate mapping to interpolate pixel values within
the input image and calculate the output pixel value.
Create Geometric Transformation Object
Different types of geometric transformation objects store different information about the transformation.
Several objects store a transformation matrix that represents a specific type of linear geometric transformation. These objects include:
affinetform2d,affinetform3d,rigidtform2d,rigidtform3d,simtform2d,simtform3d,transltform2d,transltform3d, andprojtform2d.The
geometricTransform2dandgeometricTransform3dobjects store an inverse point-wise mapping function, and optionally a forward point-wise mapping function.The
PolynomialTransformation2Dobject stores an inverse point mapping in the form of a 2-D polynomial.The
LocalWeightedMeanTransformation2DandPiecewiseLinearTransformation2Dobjects represent different forms of locally-varying point-wise mapping functions.
There are several ways to create a geometric transformation object.
| Approach to Create Geometric Transformation |
|
|
| projective2d |
| Other Geometric Transformations |
|---|---|---|---|---|---|---|
| Specify Translation, Rotation, or Scale Parameters | X | X | ||||
| Specify Transformation Matrix | X | X | X | X | ||
| Specify Custom Point-Wise Mapping Function | X | |||||
| Estimate Transformation from Control Point Pairs | X (2-D) | X (2-D) | X (2-D) | X | ||
| Estimate Transformation Using Similarity Optimization | X (2-D) | X (2-D) | X (2-D) | |||
| Estimate Transformation Using Phase Correlation | X (2-D) | X (2-D) | ||||
| Generate Random Affine Transformations | X |
Specify Translation, Rotation, or Scale Parameters
If you know the amount of translation, the rotation angle, and the scale factor, then you can create a transformation by specifying these parameters.
Specify translation to create
transltform2dandtransltform3dobjects that represent translation transformations.Specify translation, rotation angles, or both to create
rigidtform2dandrigidtform3dobjects that represent rigid transformations.Specify any combination of translation, rotation, and an isotropic scale factor to create
simtform2dandsimtform3dobjects that represent nonreflective similarity transformations.
The following example defines a translation and rotation angle, then creates a
rigidtform2d geometric transformation object from the specified
parameters.
theta = 30; translation = [10 20.5]; tform = rigidtform2d(theta,translation)
tform =
rigidtform2d with properties:
Dimensionality: 2
RotationAngle: 30
Translation: [10 20.5000]
R: [2×2 double]
A: [0.8660 -0.5000 10.0000
0.5000 0.8660 20.5000
0 0 1.0000]Specify Transformation Matrix
For more complex linear geometric transformations, you can represent the
transformation as a matrix. For example, use a matrix representation for projective
transformations or for affine transformations involving reflection, anisotropic scaling,
shear, or compositions of linear transformations. Specify the transformation matrix to
create an affinetform2d,
affinetform3d,
or projtform2d
object. For more information about creating a transformation matrix, see Matrix Representation of Geometric Transformations.
The following example defines the transformation matrix for anisotropic scaling and
reflection about the y axis, then creates an
affinetform2d geometric transformation object from the transformation
matrix.
scaleX = 0.8; scaleY = 1.5; A = [scaleX 0 0; 0 -scaleY 0; 0 0 1]; tform = affinetform2d(A)
tform =
affinetform2d with properties:
Dimensionality: 2
A: [0.8000 0 0
0 -1.5000 0
0 0 1.0000]Specify Custom Point-Wise Mapping Function
If you have an inverse point-wise mapping function, then you can create a custom 2-D
and 3-D geometric transformation using the geometricTransform2d and the geometricTransform3d objects respectively.
The following example specifies an inverse mapping function that accepts and returns
2-D points in packed (x,y) format. Then, the example
creates a geometricTransform2d geometric transformation object from the
inverse mapping function.
inversefn = @(c) [c(:,1)+c(:,2),c(:,1).^2]
inversefn =
function_handle with value:
@(c)[c(:,1)+c(:,2),c(:,1).^2]tform = geometricTransform2d(inversefn)
tform =
geometricTransform2d with properties:
InverseFcn: [function_handle]
ForwardFcn: []
Dimensionality: 2Similarly, the following example creates a geometricTransform3d
geometric transformation object using the inverse mapping function. The example specifies
an inverse mapping function that accepts and returns 3-D points in packed
(x,y,z) format.
inversefn = @(c)[c(:,1)+c(:,2),c(:,1)-c(:,2),c(:,3).^2]
inversefn =
function_handle with value:
@(c)[c(:,1)+c(:,2),c(:,1)-c(:,2),c(:,3).^2]tform = geometricTransform3d(inversefn)
tform =
geometricTransform3d with properties:
InverseFcn: [function_handle]
ForwardFcn: []
Dimensionality: 3Estimate Transformation from Control Point Pairs
You can create a geometric transformation object by passing pairs of control points to
the fitgeotform2d
function. The fitgeotform2d function automatically estimates the
transformation from these points and returns one of the geometric transformation
objects.
Different transformations require a varying number of points. For example, affine transformations require three non-collinear points in each image (a triangle) and projective transformations require four points (a quadrilateral).
This example defines two pairs of control points, then uses the
fitgeotform2d to create an affinetform2d geometric
transformation object.
movingPoints = [11 11;21 11; 21 21];
fixedPoints = [51 51;61 51;61 61];
tform = fitgeotform2d(movingPoints,fixedPoints,"affine")tform =
affinetform2d with properties:
Dimensionality: 2
A: [1.0000 0 40.0000
0 1.0000 40.0000
0 0 1.0000]Estimate Transformation Using Similarity Optimization
If you have a fixed image and a moving image that are slightly misaligned, then you
can use the imregtform function to estimate an affine
geometric transformation that aligns the images. imregtform optimizes
the mean squares or Mattes mutual information similarity metric of the two images, using a
regular step gradient descent or one-plus-one evolutionary optimizer. For more
information, see Create an Optimizer and Metric for Intensity-Based Image Registration.
Estimate Transformation Using Phase Correlation
If you have a fixed image and a moving image that are severely misaligned, then you
can use the imregcorr function to estimate an affine
geometric transformation that improves the image alignment. You can refine the resulting
transformation by using similarity optimization.
Generate Random Affine Transformations
You can create an affine geometric transformation with randomized transformation
parameters using the randomAffine2d and randomAffine3d functions. These functions support all affine parameters
including reflection about each axis, rotation, shearing, and anisotropic scale factors.
Randomized affine transformations are commonly used as a data augmentation technique for
deep learning.