segmentLidarData
Segment organized 3-D range data into clusters
Syntax
Description
labels = segmentLidarData(ptCloud,distThreshold)ptCloud into clusters. The
function assigns an integer cluster label to each point in the point cloud and
returns the cluster label of all points in labels.
The function groups two neighboring points into the same cluster if their
Euclidean distance is less than distThreshold or if the angle
between the sensor and two neighboring points is at least 5 degrees.
labels = segmentLidarData(ptCloud,distThreshold,angleThreshold)angleThreshold.
[
also returns the number of clusters.labels,numClusters] = segmentLidarData(___)
[___] = segmentLidarData(___,NumClusterPoints=[1,Inf])
also sets the minimum and maximum number of points in each cluster, specified as a
2-element vector or as a scalar value. When you specify
NumClusterPoints as a scalar, the maximum number of points in
the cluster is unrestricted. The function sets the labels to
0 when clusters are outside of the specified range.
Examples
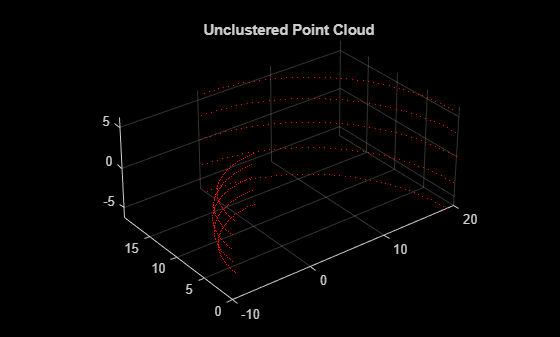
Create organized synthetic lidar data containing two objects.
ldr = zeros(5,100); ldr(:,1:50) = 10; ldr(:,51:end) = 20; pitch = linspace(-18,18,5); pitch = repmat(pitch',1,100); yaw = linspace(-90,90,100); yaw = repmat(yaw,5,1);
Convert to Cartesian coordinates.
X = ldr .* cosd(pitch) .* sind(yaw); Y = ldr .* cosd(pitch) .* cosd(yaw); Z = ldr .* sind(pitch); pc = pointCloud(cat(3,X,Y,Z)); figure pcshow(pc.Location,'r') title('Unclustered Point Cloud')
Set the threshold.
distThreshold = 5;
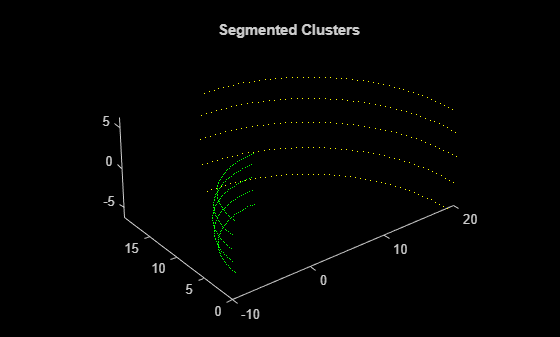
Segment the lidar data.
labels = segmentLidarData(pc,distThreshold);
Plot the results.
figure hold on title('Segmented Clusters') pc1 = select(pc,find(labels == 1)); pcshow(pc1.Location,'g') pc2 = select(pc,find(labels == 2)); pcshow(pc2.Location,'y')
Set up the PCAP file reader.
veloReader = velodyneFileReader('lidarData_ConstructionRoad.pcap','HDL32E');
Wait for 0.3 seconds from the beginning of the file, then read the point cloud from the next frame.
veloReader.CurrentTime = veloReader.StartTime + seconds(0.3); ptCloud = readFrame(veloReader);
Segment and remove the ground plane.
groundPtsIdx = segmentGroundFromLidarData(ptCloud); ptCloudWithoutGround = select(ptCloud,~groundPtsIdx,'OutputSize','full');
Cluster the remaining points. Distance is in meters.
distThreshold = 0.5; [labels,numClusters] = segmentLidarData(ptCloudWithoutGround,distThreshold);
Add an additional label for the ground plane.
numClusters = numClusters+1; labels(groundPtsIdx) = numClusters;
Plot the labeled results. Display the ground plane in black.
labelColorIndex = labels+1;
pcshow(ptCloud.Location,labelColorIndex)
colormap([hsv(numClusters);[0 0 0]])
title('Point Cloud Clusters')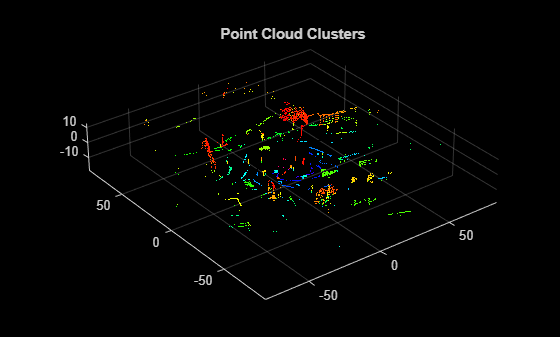
Input Arguments
Point cloud, specified as a pointCloud object.
ptCloud is an organized point cloud that stores
point coordinates in an M-by-N-by-3
matrix. The points must be organized by pitch and yaw angles in a sequential
scanning order, which is typically obtained from laser range finders and the
velodyneFileReader.
Distance threshold in world units, specified as a nonnegative scalar.
Adjacent points are grouped into the same cluster if the distance between
them is less than the distance threshold. To reduce the number of output
clusters, increase the value of distThreshold.
Data Types: single | double
Angle threshold, in degrees, specified as a scalar in the range [0, 180].
To reduce the number of output clusters, decrease the value of
angleThreshold. The function groups adjacent points
into the same cluster if the angle formed by the sensor and the points is
greater than the angle threshold. For example, in the figure, the function
groups points A and B into the same cluster if the angle formed by the
sensor, point A, and point B, is greater than
angleThreshold. For more details, see Algorithms. 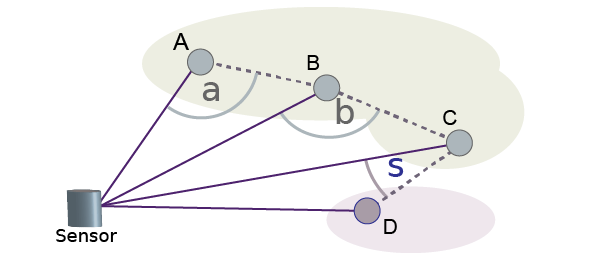
Data Types: single | double
Output Arguments
Algorithms
The segmentLidarData function uses distance and angle thresholds to
cluster neighboring points. The function groups two neighboring points into the same
cluster if their Euclidean distance is less than the input
distThreshold or if the angle between the sensor and
neighboring points is greater than or equal to the input
angleThreshold. If you do not specify
angleThreshold, the function sets this angle to
5 degrees.
For example, suppose angleThreshold is set to
90. Because angles α and β in the figure are both greater than
the specified threshold of 90 degrees, the function groups points A, B, and C into the
same cluster. Because angle σ is less than the 90-degree threshold, the function groups
point D into a separate cluster. Each angle the function uses for clustering is formed
by the line from a point to the sensor and the line from that same point to the
neighboring point
References
[1] Bogoslavskyi, I. “Efficient Online Segmentation for Sparse 3D Laser Scans.” Journal of Photogrammetry, Remote Sensing and Geoinformation Science. Vol. 85, Issue 1, 2017, pp. 41–52.
Extended Capabilities
Version History
Introduced in R2018a
See Also
pointCloud | pcsegdist | pcfitplane | velodyneFileReader | segmentGroundFromLidarData