vision.PeopleDetector
(Removed) Detect upright people using HOG features
vision.PeopleDetectorpeopleDetectorACF function to detect people,
instead.
Description
The people detector object detects people in an input image using the Histogram of Oriented Gradient (HOG) features and a trained Support Vector Machine (SVM) classifier. The object detects unoccluded people in an upright position.
To detect people in an image:
Create the
vision.PeopleDetectorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
peopleDetector = vision.PeopleDetectorpeopleDetector, that tracks a set
of points in a video.
peopleDetector = vision.PeopleDetector(model)ClassificationModel property to model.
peopleDetector = vision.PeopleDetector(Name,Value)peopleDetector =
vision.PeopleDetector('ClassificationModel','UprightPeople_128x64')
Properties
Usage
Description
bboxes = peopleDetector(I)I and
returns an M-by-4 matrix defining M bounding
boxes. M represents the number of detected people. Each row of the
output matrix, BBOXES, contains a four-element vector,
[x
y width height]. This vector specifies, in pixels, the upper-left
corner and size, of a bounding box. When no people are detected, the object returns an
empty vector. The input image, I, must be a grayscale or truecolor
(RGB) image.
[
additionally returns a confidence value for the detections.bboxes,
scores] = peopleDetector(I)
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object™ as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
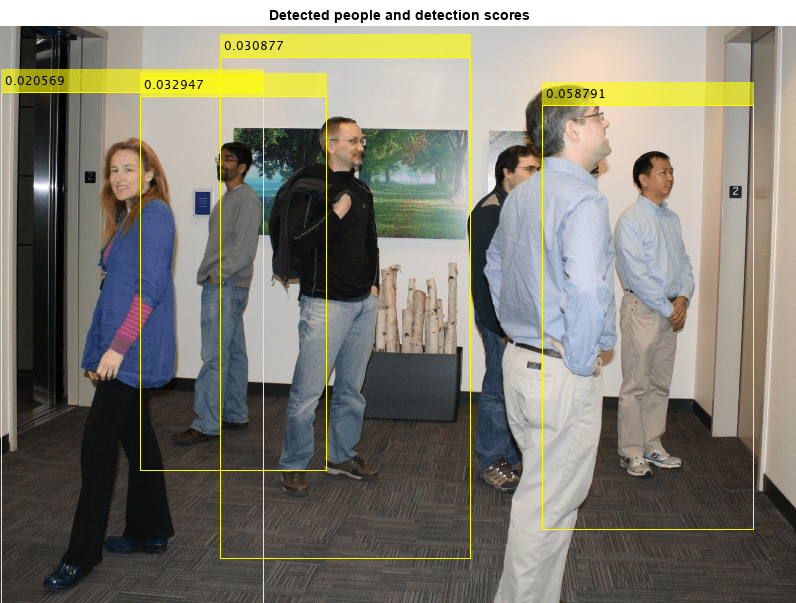
Create a people detector and load the input image.
peopleDetector = vision.PeopleDetector; I = imread('visionteam1.jpg');Detect people using the people detector object.
[bboxes,scores] = peopleDetector(I);
Annotate detected people.
I = insertObjectAnnotation(I,'rectangle',bboxes,scores); figure, imshow(I) title('Detected people and detection scores');
References
[1] Dalal, N. and B. Triggs. “Histograms of Oriented Gradients for Human Detection,”Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, June 2005, pp. 886-893.