visionhdl.LookupTable
Map input pixel to output pixel using custom rule
Description
The visionhdl.LookupTable
System object™ uses a custom one-to-one map to convert between an input pixel value and
an output pixel value.
To map an input pixel value to an output pixel value:
Create the
visionhdl.LookupTableobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Properties
Usage
Description
This object uses a streaming pixel interface with a structure
for frame control signals. This interface enables the object to operate independently of image
size and format and to connect with other Vision HDL Toolbox™ objects. The object accepts and returns a scalar pixel value and control signals
as a structure containing five signals. The control signals indicate the validity of each pixel
and its location in the frame. To convert a pixel matrix into a pixel stream and control
signals, use the visionhdl.FrameToPixels object. For a
description of the interface, see Streaming Pixel Interface.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
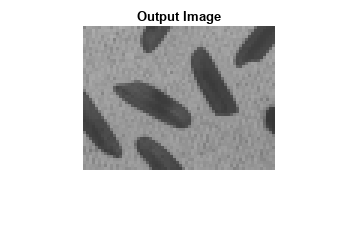
Create the negative of an image by looking up the opposite pixel values in a table.
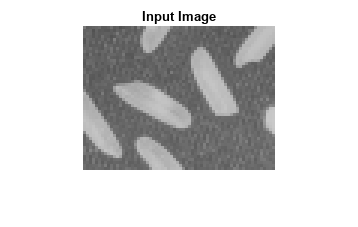
Set dimensions of the test image, and load an image source. Select a portion of the image matching the desired test size.
frmActivePixels = 64; frmActiveLines = 48; frmOrig = imread('rice.png'); frmInput = frmOrig(1:frmActiveLines,1:frmActivePixels); figure imshow(frmInput) title 'Input Image'
Create a serializer object and define inactive pixel regions.
frm2pix = visionhdl.FrameToPixels( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines, ... 'TotalPixelsPerLine',frmActivePixels+10, ... 'TotalVideoLines',frmActiveLines+10, ... 'StartingActiveLine',6, ... 'FrontPorch',5);
Create a lookup table object. The input pixel data type is uint8, so the negative value is 255-pixel. The output pixel data type is the same as the data type of the table contents.
tabledata = uint8(linspace(255,0,256)); inverter = visionhdl.LookupTable(tabledata);
Serialize the test image. pixIn is a vector of intensity values. ctrlIn is a vector of control signal structures.
[pixIn,ctrlIn] = frm2pix(frmInput);
Initialize the output variables. Then, for each pixel in the padded frame, look up its negative value.
[~,~,numPixelsPerFrame] = getparamfromfrm2pix(frm2pix); pixOut = zeros(numPixelsPerFrame,1,'uint8'); ctrlOut = repmat(pixelcontrolstruct,numPixelsPerFrame,1); for p = 1:numPixelsPerFrame [pixOut(p),ctrlOut(p)] = inverter(pixIn(p),ctrlIn(p)); end
Create deserializer object with a video format matching that of the serializer. Convert the output pixel stream to an image frame, and display the result.
pix2frm = visionhdl.PixelsToFrame( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines, ... 'TotalPixelsPerLine',frmActivePixels+10); [frmOutput,frmValid] = pix2frm(pixOut,ctrlOut); if frmValid figure imshow(frmOutput) title 'Output Image' end