CAN FD Configuration
配置指定 CAN FD 设备的参数
库:
Vehicle Network Toolbox /
CAN FD Communication
描述
CAN FD Configuration 模块配置可用于传输和接收报文的 CAN FD 设备的参数。
在配置其他 CAN FD 模块之前,请先指定 CAN FD 设备的配置。
使用一个 CAN FD Configuration 模块对模型中发送和接收报文的每个设备进行配置。如果使用 CAN FD Receive 或 CAN FD Transmit 模块来接收和发送设备上的报文,则模型会检查对于指定设备是否存在对应的 CAN FD Configuration 模块。
注意
您需要 Vehicle Network Toolbox™ 和 Simulink® 软件的许可证才能使用此模块。
其他支持的功能
CAN FD Configuration 模块支持使用 Simulink 加速模式。使用此功能,可以加快 Simulink 模型的执行速度。有关详细信息,请参阅加速 (Simulink)。
示例
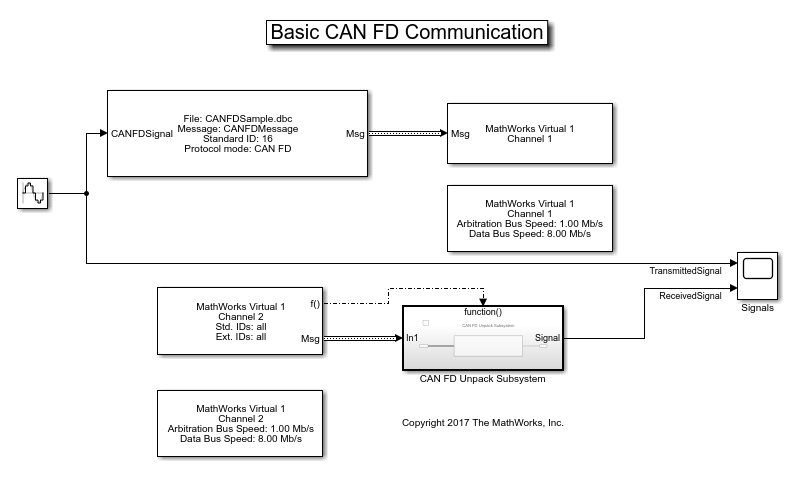
Simulink CAN FD 通信快速入门
此示例说明如何在 Simulink® 中使用 MathWorks® 虚拟 CAN FD 通道来设置 CAN FD 报文的传输和接收。虚拟通道以环回配置形式连接。
记录并回放 CAN FD 报文
以下示例说明如何使用 Simulink® 中的 MathWorks® 虚拟 CAN FD 通道记录和回放 CAN FD 报文。您可以更新此模型以连接到您的系统上支持的硬件。
参数
扩展功能
版本历史记录
在 R2018a 中推出