CAN FD Receive
接收来自指定的 CAN FD 设备的 CAN FD 报文

库:
Vehicle Network Toolbox /
CAN FD Communication
描述
CAN FD Receive 模块从 CAN 网络接收报文并将其传递给 Simulink® 模型。它根据模块参数在每个时间步输出一条报文或所有报文。
注意
您需要 Vehicle Network Toolbox™ 和 Simulink 软件的许可证才能使用此模块。
CAN FD Receive 模块有两个输出端口:
f()输出端口是 Function-Call 子系统的触发器。如果模块接收到新报文,则会从这个端口触发 Function-Call。然后,您可以连接到 Function-Call Subsystem (Simulink) 以解包并处理报文。Msg输出端口包含在该特定时间步接收的 CAN 报文。模块将报文输出为 Simulink 总线信号。有关 Simulink 总线对象的详细信息,请参阅合成接口 (Simulink)。
CAN FD Receive 模块将 CAN 报文存储在一个先进先出 (FIFO) 缓冲区中。该 FIFO 缓冲区在每个时间步按照排队顺序将报文传递给模型。
注意
在一个模型中,一个 PEAK-System 设备通道只能连接一个 CAN FD Receive 模块。
其他支持的功能
CAN FD Receive 模块支持使用 Simulink 加速模式。使用此功能,可以加快 Simulink 模型的执行速度。有关详细信息,请参阅加速 (Simulink)。
CAN FD Receive 模块支持使用代码生成和 packNGo 函数将所需的源代码和依赖共享库打包。
代码生成
Vehicle Network Toolbox 提供的 Simulink 模块支持您生成代码,使包含这些模块的模型可在加速、快速加速、外部和已部署模式下运行。
您可以将 Vehicle Network Toolbox、Simulink Coder™ 和 Embedded Coder® 软件结合使用,以在您用来实现模型的主机端生成代码。有关代码生成的详细信息,请参阅生成代码编译 (Simulink Coder)。
该模块生成的代码可移植性有限。它使用预编译的共享库(如 DLL)来支持特定类型设备的 I/O。使用此模块,您可以使用 Simulink Coder 支持的 packNGo 函数来设置和管理模型的编译信息。packNGo (Simulink Coder) 函数允许您将模型代码和依赖共享库打包到一个 zip 文件中进行部署。您不需要在目标系统上安装 MATLAB®,但需要 MATLAB 支持目标系统。
要设置 packNGo,请执行以下代码:
set_param(gcs,'PostCodeGenCommand','packNGo(buildInfo)');
在此示例中,gcs 是您要编译的当前模型。编译模型会创建一个与模型同名的 zip 文件。您可以将此 zip 文件移至另一台机器,并在该机器中编译 zip 文件中的源代码以创建可独立于 MATLAB 和 Simulink 运行的可执行文件。生成的代码使用 C 和 C++ 编译器进行编译。有关详细信息,请参阅代码编译自定义 (Simulink Coder)。
注意
在 Linux® 平台上,您需要将用于解压缩库的文件夹添加到环境变量 LD_LIBRARY_PATH。
示例
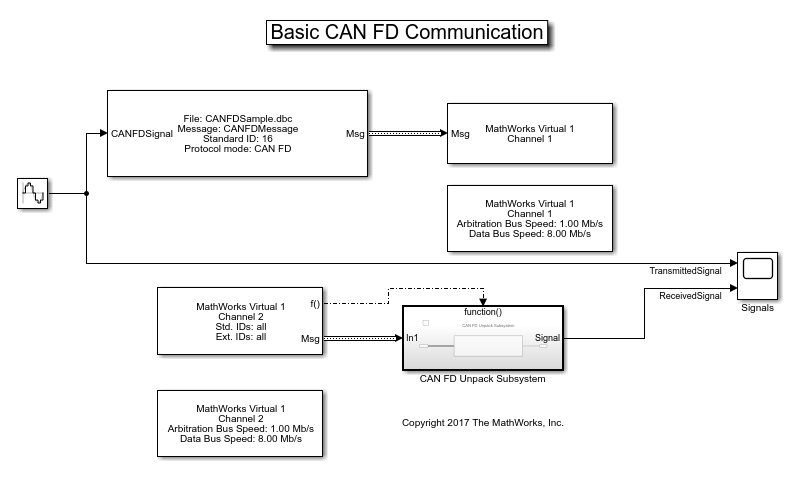
Simulink CAN FD 通信快速入门
此示例说明如何在 Simulink® 中使用 MathWorks® 虚拟 CAN FD 通道来设置 CAN FD 报文的传输和接收。虚拟通道以环回配置形式连接。
记录并回放 CAN FD 报文
以下示例说明如何使用 Simulink® 中的 MathWorks® 虚拟 CAN FD 通道记录和回放 CAN FD 报文。您可以更新此模型以连接到您的系统上支持的硬件。
端口
输出
参数
扩展功能
版本历史记录
在 R2018a 中推出