Design and Test Traffic Jam Assist, A Case Study
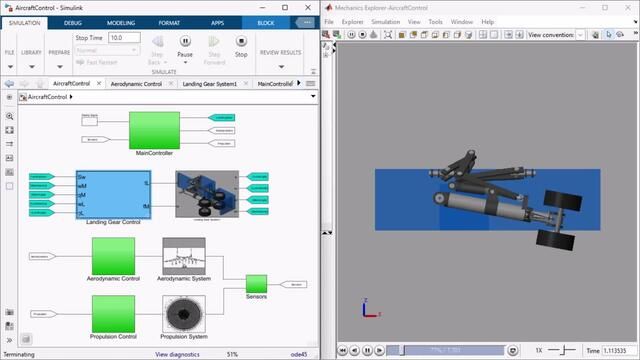
Traffic jam assist systems require a combination of longitudinal control, stop and go management, and lateral control with lane following control. This presentation will show you how to:
- Design a MPC-based lane following and longitudinal controller
- Specify driving scenarios using the Driving Scenario Designer app
- Synthesize sensor detection using a vision and radar sensor model
- Design a sensor fusion algorithm
- Run tests in simulation
Recorded: 2 May 2018
Related Products
Learn More

Featured Product