Řízení pomocí PID regulátorů je nejčastěji využívaným typem regulace. Zatímco teorie skrývající se za touto regulací je v podstatě jednoduchá, může být praktická konstrukce a ladění PID regulátorů obtížné a časově náročné.
Úvod semináře je věnován stručnému shrnutí teorie PID regulace. Následně je představena jednoduchá a přímočará cesta, jak rychle navrhnout, naladit a implementovat PID regulátory. Na demonstračních příkladech je ukázáno, jak naladit PID regulátory pro řídicí systémy v různých průmyslových odvětvích, a jak řešit některé praktické aspekty, jako je např. převod ze spojité časové oblasti do diskrétní, saturace výstupu, anti-windup nebo gain scheduling. V závěru jsou představeny možnosti nasazení navržených a naladěných regulátorů na embedded platformy, převod algoritmů do fixed-point aritmetiky a možnosti verifikace a validace získaného zdrojového kódu.
Tento www seminář je určen všem zájemcům, kteří se chtějí seznámit s přístupem k PID regulaci v prostředí MATLAB a Simulink.
Souhrn:
- úvod do teorie PID regulace
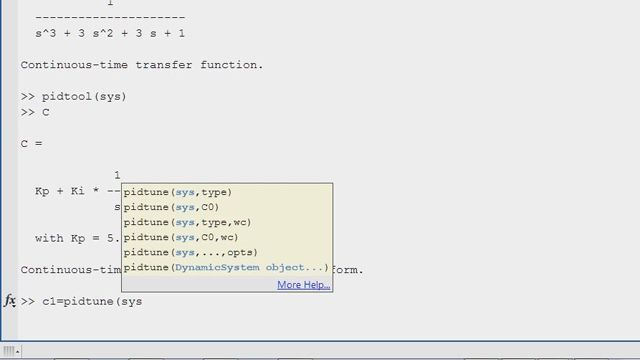
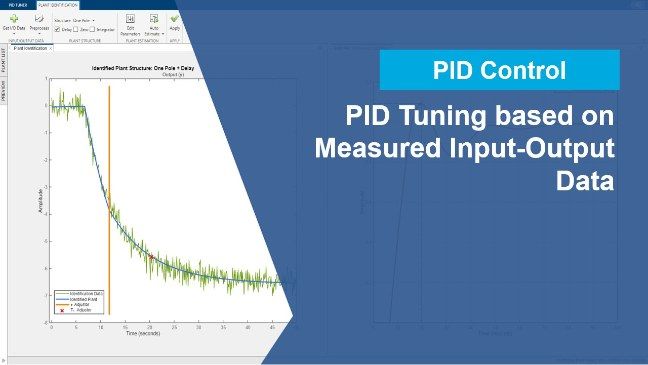
- návrh PID regulátorů v MATLABu a Simulinku
- nasazení PID regulátorů na embedded platformy