Test Automation and ISO 26262 Preparation for New Bus Product Line with Fully Electrified Powertrain
Dr. Sven Semmelrodt, Continental
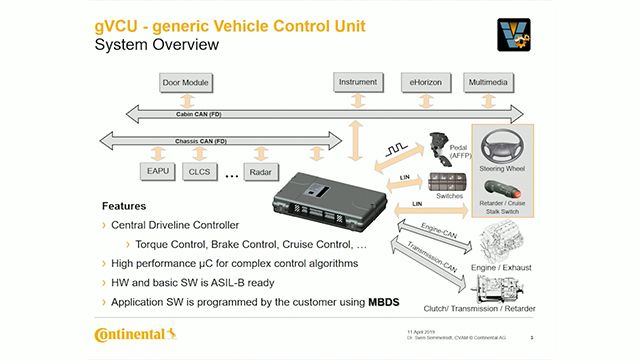
A vehicle control unit (VCU) is intended to implement higher level powertrain functions, such as cruise control, speed limiter, or fuel-saving assistants, to release the engine control unit from complex and resource-consuming calculations. Within VDLs next-generation bus product line, a Continental VCU device is utilized for top-level management and control of the fully electrified powertrain.
Continental provides a generic VCU device as well as basic software and a MATLAB® and Simulink® based software development toolchain called MBDS to the truck and bus OEMs. Through this toolchain, VDL is able to implement the complete VCU functionality. Using the model-based development system toolchain, MBDS, the design, integration, test, and build of the VCU software is done.
MBDS supports a fully automated model test approach, which is easy to use and powerful, to increase software quality and satisfy ISO 26262 requirements. Test definition is done using Microsoft® Excel® sheets representing different test cases. Both, stimuli and expected values, including tolerances, are specified for fully automated tests. The test cases can be applied on different test levels (model-in-the-loop, software-in-the-loop, and process-in-the-loop) and the results for all levels are summarized within a HTML-based test report. The report provides all required information about the test run, including test descriptions and visualization of the test stimuli, the expected values, and tolerances. Even references to requirements are covered for analyzing traceability of all test activities. Especially for qualifying the generated C code, the test coverage information can be captured for model-in-the-loop tests.
MBDS provides a simple MATLAB command line API to open and close projects, run tests, and build and download the final target software. Through a batch tool, a remote control session of MBDS can be established for nightly test and build sessions using a Jenkins™ server or other batch job environments.