Spacesium 创建深度学习系统以使用 MATLAB 分割大型激光雷达点云
处理超大型激光雷达点云不仅速度很慢,而且成本极高。使用 MATLAB,Spacesium 开发了一种深度学习解决方案,可以更准确地标注激光雷达点云并提高速度。
关键成果
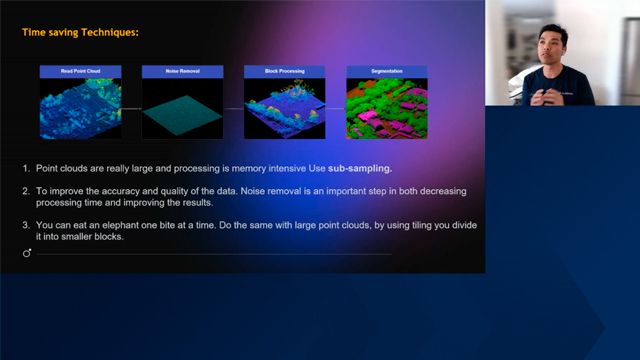
- 通过使用 Lidar Toolbox 进行子采样和分块来缩短处理时间
- 通过使用 Computer Vision Toolbox 对点云进行去噪来提高精确度
- 通过用深度学习模型代替基于特征的方法来改进对象分割
Spacesium 是一家澳大利亚公司,致力于为不同行业开发地理信息系统软件。该公司必须周期性解决的一个问题是确保快速准确地处理激光雷达点云。有时候,激光雷达云点会非常大,包含很多噪声,很难及时提取有用的信息。
为了应对这些挑战,Spacesium 使用 MATLAB® 创建了深度学习解决方案,可以快速处理和标注超大型激光雷达点云。公司团队使用 Lidar Toolbox™ 对点云进行下采样,并在没有明显信息损失的情况下减小了点云大小。如果点云非常大,可以使用 Lidar Toolbox 将其分解为可以独立处理的更小分块。该团队使用 Computer Vision Toolbox™ 对点云进行去噪,提高了结果的准确度。
传统基于特征的点云数据处理方法可能既慢又不精确。使用 Deep Learning Toolbox™,Spacesium 训练了一个 PointNet++ 网络(该网络可通过单一函数来创建)以分割在点云中表示的对象。提取的数据存储在一个单独文件中,以便与原始点云数据一起用于其他应用。
该深度学习解决方案正用于各种行业,包括林业、电力线和基础架构分析、灾害管理和矿业。