HDL QPSK Transmitter and Receiver
This example shows how to implement a QPSK transmitter and receiver in Simulink® that is optimized for HDL code generation and hardware implementation.
This example will be removed in a future release. For an updated QPSK example for hardware, see QPSK Transmitter and Receiver (Wireless HDL Toolbox). The new example requires a Wireless HDL Toolbox license. The new example includes a MATLAB® behavioral reference and performs blind symbol timing recovery and frequency synchronization.
The model shown in this example modulates data based on quadrature phase shift keying (QPSK). The goal of this example is to model an HDL QPSK communications system that can transmit and recover information for a real-time system. The receiver implements symbol timing synchronization and carrier frequency and phase synchronization, which are essential in a single-carrier communications system.
System Specifications
This section explains the specifications of the transmitter and receiver used in this example. The transmitter uses a packet-based frame format. To generate a preamble sequence, each bit of the 13-bit Barker sequence is repeated twice such that the same bit is modulated in the in-phase and quadrature-phase by the QPSK Modulator. The preamble sequence is followed by 2240 bits of payload data. The transmitter runs using a root raised cosine (RRC) pulse-shaping filter with a roll-off factor of 0.5, resulting in a bandwidth of 1.5 times the symbol rate. It uses four samples per symbol, resulting in a sample rate of four times the symbol rate. The RRC impulse response spans over four adjacent symbols. The bit rate is twice the symbol rate. The effective average bit rate is the bit rate times the frame efficiency. The frame efficiency is (2240/(2240+26)) , which equals to 0.9885.
The default symbol rate is set to 1.92 Mbaud, which results in a bandwidth of 1.5 times 1.92e6, which equals to 2.88 MHz, and a sample rate of 4 times 1.92e6, which equals to 7.68 Msps, bit rate of 2 times 1.92e6, which equals to 3.84 Mbps. The effective average bit rate supported by this system is 0.9885 times 3.84e6, which equals to 3.7959 Mbps. The entire system runs at a single maximum clock rate of 7.68 MHz. To achieve lower sample rates, the valid signal is handled accordingly. These specifications vary with the symbol rate.
Model Architecture
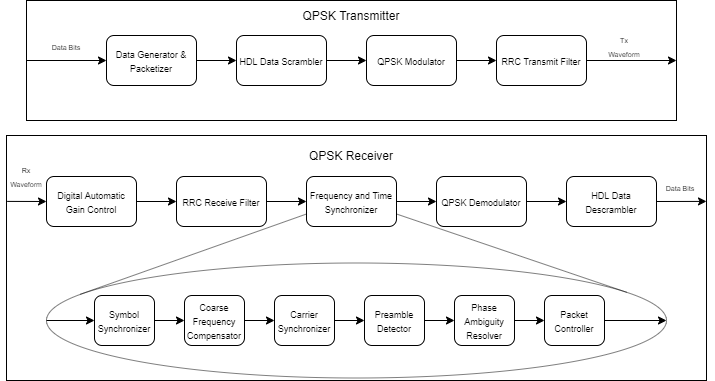
This section explains the high-level architecture of the QPSK transmitter and receiver as shown in the block diagram. The QPSK transmitter samples the input at a bit rate of twice the symbol rate. The Data Generator & Packetizer collects the data bits, generates the preamble bits, and forms the packet bits. The HDL Data Scrambler scrambles the data bits of each packet to increase bit transitions and avoid long running sequences of the same bit. The QPSK Modulator modulates the packet bits to generate QPSK symbols. The RRC Transmit Filter upsamples and pulse-shapes the QPSK symbols to generate the Tx Waveform at a sample rate of four times that of the symbol rate. The QPSK receiver samples the input at the transmission rate. The Digital AGC performs gain control to the desired amplitude level of the received waveform. The RRC Receive Filter performs matched filtering on the AGC output. The Frequency and Time Synchronizer performs synchronization operations and generates QPSK symbols for each packet. The QPSK Demodulator demodulates the QPSK symbols to generate packet bits. The HDL Data Descrambler descrambles the packet data bits that stream out of the receiver.
File Structure
The example contains the following Simulink model and MATLAB® scripts.
commhdlQPSKTxRx— Top-level Simulink modelcommhdlQPSKTxRxParameters— Generates parameters for QPSK Tx and QPSK Rx required for initializationcommhdlQPSKTxRxModelInit— Initializes thecommhdlQPSKTxRxmodelgenerateHelloworldMsgBits— Generates "Hello world xxx " message bits. xxx refers to values from 000 to 100.
System Interface
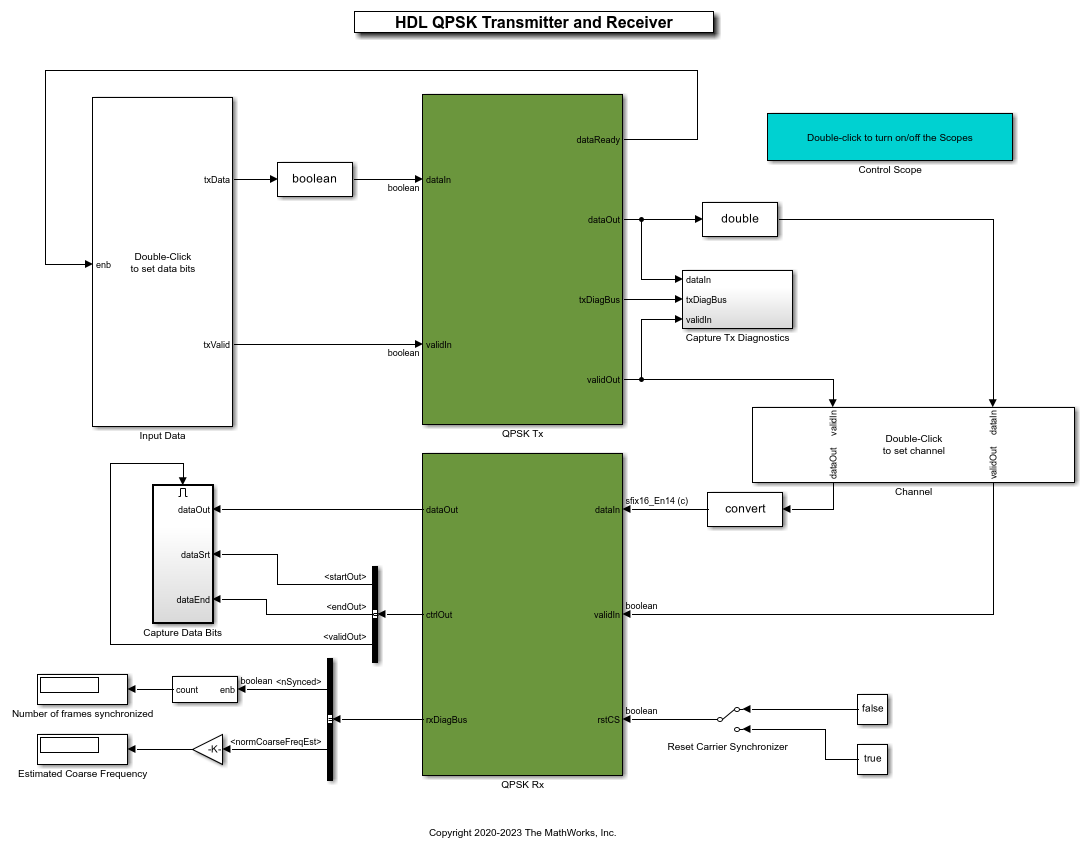
This figure shows the top-level model of the QPSK transmitter and receiver system.
Transmitter Inputs
dataIn — Input data, specified as a Boolean scalar.
validIn — Control signal to validate the dataIn, specified as a Boolean scalar.
Transmitter Outputs
dataOut — Output transmitted waveform, returned as 16-bit complex data at a sample rate four times that of the symbol rate.
validOut — Control signal to validate the dataOut, returned as a Boolean scalar.
txDiagBus — Status signal with diagnostic outputs, returned as a Bus signal.
dataReady — Signal to indicate a ready for the input signals, returned as a Boolean scalar.
Receiver Inputs
dataIn — Input data, specified as a 16-bit complex data with sample rate as the transmitter output.
validIn — Control signal to validate the dataIn, specified as a Boolean scalar.
Receiver Outputs
dataOut — Decoded output data bits, returned as a Boolean scalar.
ctrlOut — Bus signal with start, end, and valid signals, returned as a bus signal.
rxDiagBus — Status signal with diagnostic outputs, returned as a bus signal.
Transmitter Structure
This figure shows the top-level model of the QPSK Tx subsystem.

Bit Packetizer
The Bit Packetizer subsystem consists of a Data Bits FIFO subsystem and a Preamble Bits Generator subsystem. It stores input data and reads it out whenever required. It also generates the dataReady signal to indicate if the transmitter is ready to accept input data.
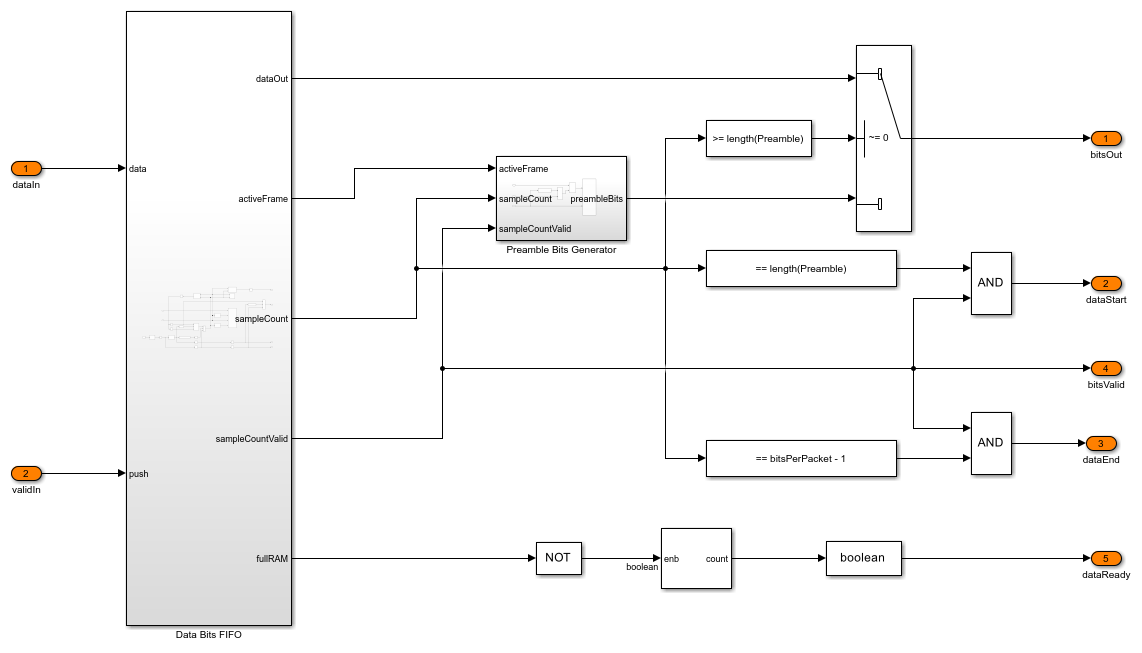
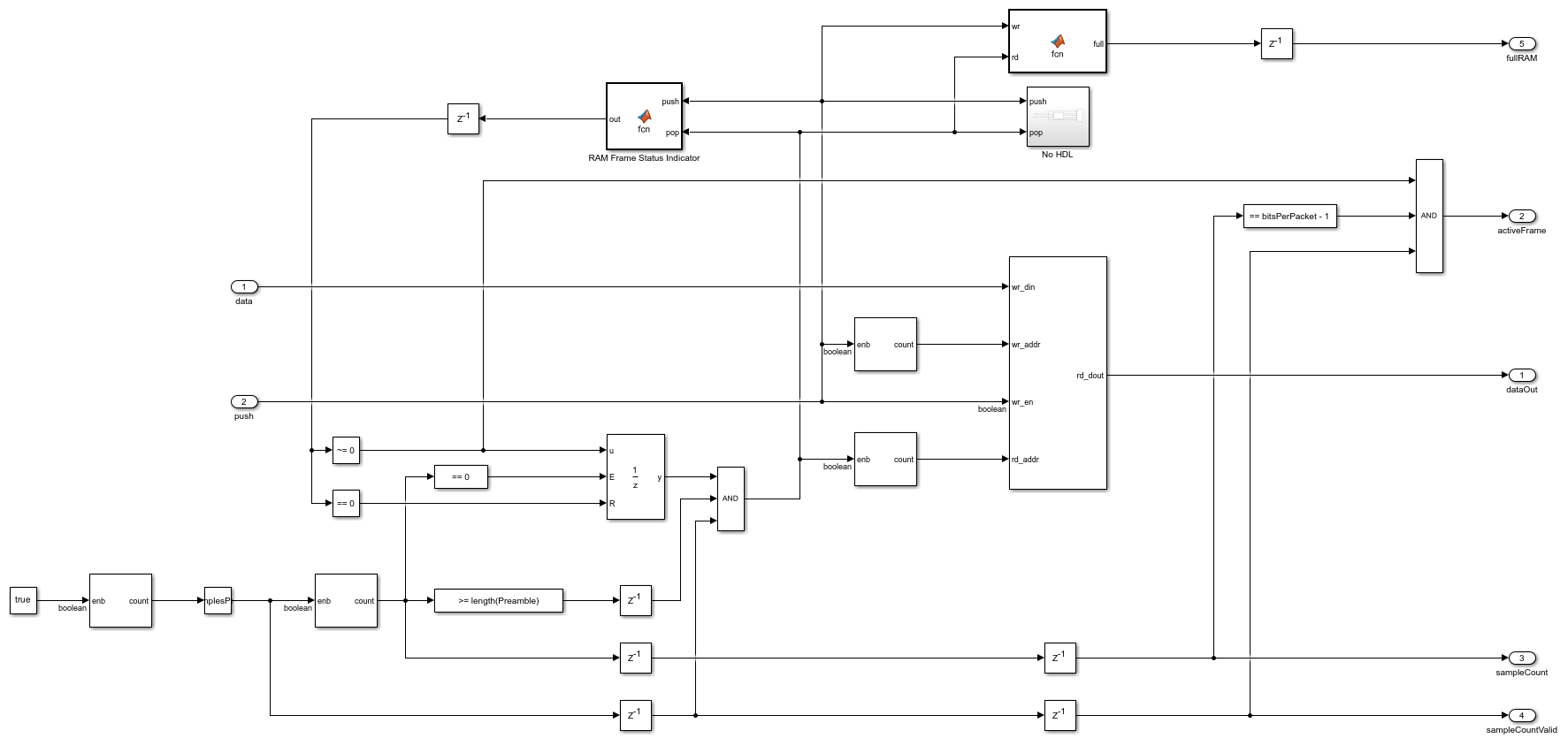
The Data Bits FIFO subsystem collects input data bits and stores them in a RAM. The RAM can fit two data packets to store the current data packet while reading out the previous packet. The RAM Frame Status Indicator function counts the number of packets currently stored in RAM. The subsystem reads data from the RAM only if at least one packet is available.
The Preamble Bits Generator subsystem gives out valid preamble sequence if there is at least one packet available in the RAM. Otherwise, it gives out random sequence.
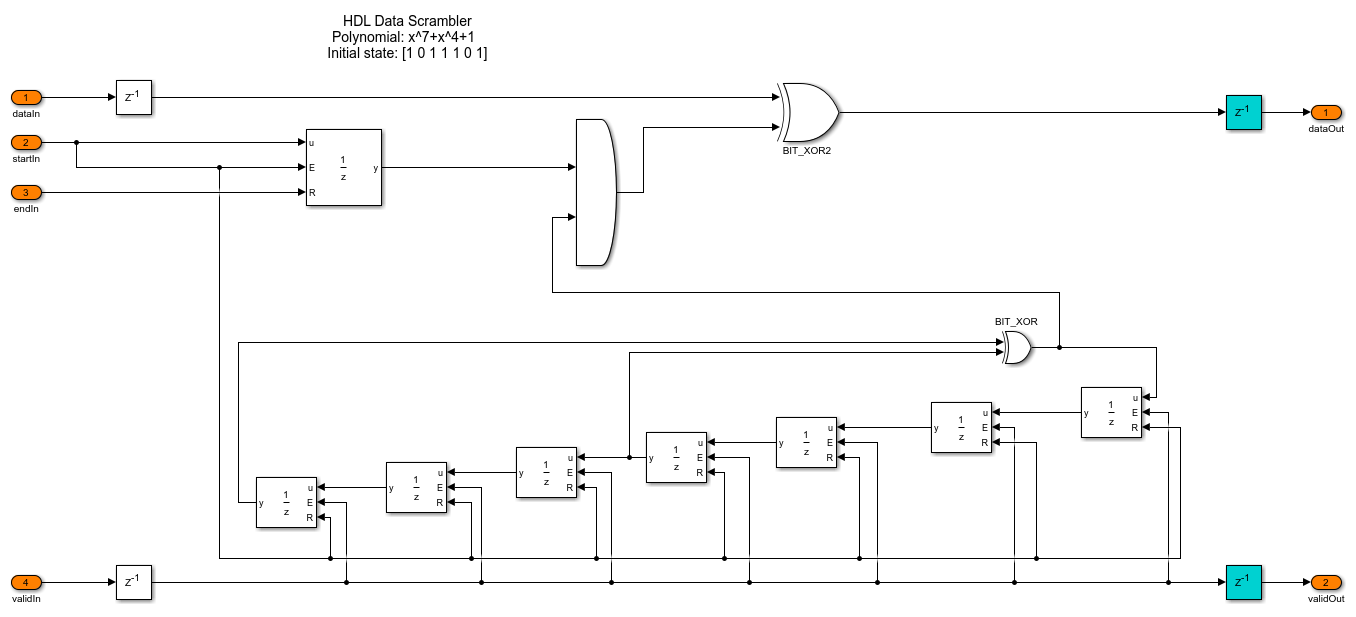
HDL Data Scrambler
The HDL Data Scrambler subsystem scrambles the data bits in each packet by using the control signals generated by the Bits Generator subsystem.
QPSK Modulator
The QPSK Modulator subsystem uses the QPSK Modulator Baseband block to modulate the preamble and data bits to generate QPSK symbols. It uses a gray mapping as described in this table.
Bits Mapping
____ _________________
00 0.70711+0.70711i
01 -0.70711+0.70711i
11 -0.70711-0.70711i
10 0.70711-0.70711i
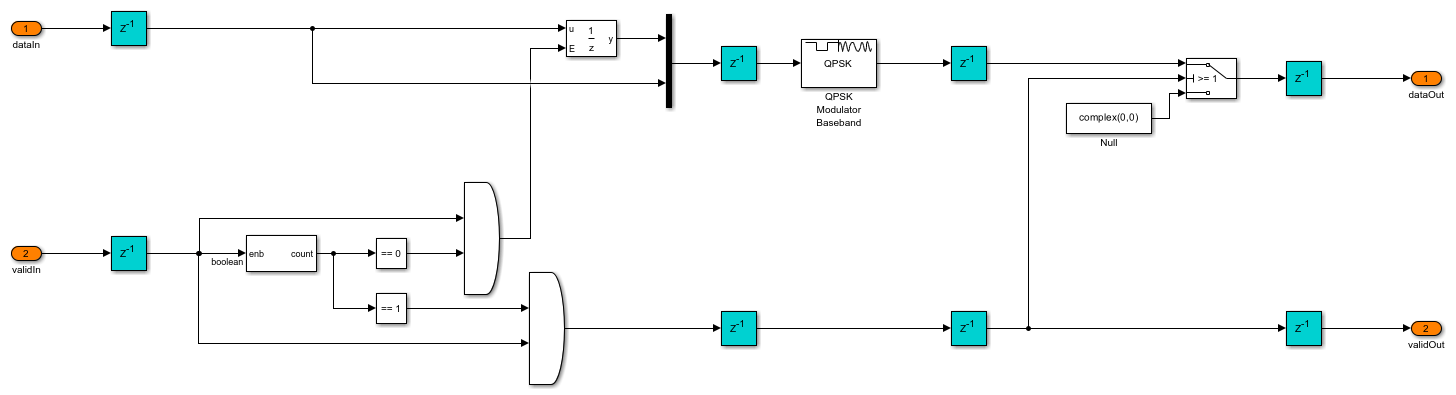
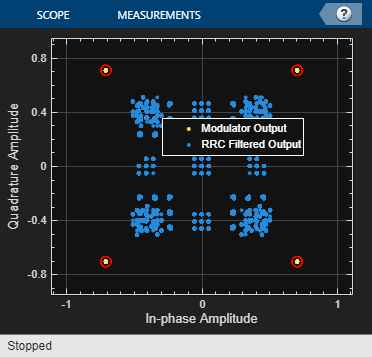
RRC Transmit Filter
The RRC Transmit Filter subsystem accepts input signals at a clock rate of 4 times the symbol rate that is a valid symbol followed by 3 zeros. This discrete valid signal is made continuous using the unit delay enabled block, which is equivalent to upsampling by 4. This upsampled signal is fed to the Discrete FIR Filter (DSP HDL Toolbox) block with an RRC impulse response to pulse-shape the transmitter waveform. The receive filter in the QPSK receiver forms a matched filter to this transmit filter.

Receiver Structure
This figure shows the top-level overview of the QPSK Rx subsystem.

Automatic Gain Control
As the input signal amplitude affects the symbol and carrier synchronizer phase-locked loop (PLL) performance, the Automatic Gain Control subsystem is placed ahead of them. The magnitude squared output is compared with the AGC reference to generate an amplitude error. This error is multiplied with the loop gain and passed through an integrator to calculate the required gain. The resulted gain is multiplied with the AGC input to generate the AGC output. For more information, see Chapter 9.5 of [ 1 ].

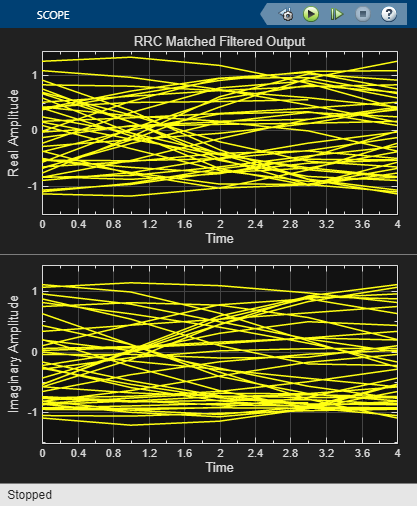
RRC Receive Filter
The RRC Receive Filter is a Discrete FIR Filter (DSP HDL Toolbox) block with matched filter coefficients of the filter used for pulse-shaping in the transmitter. The RRC matched filtering generates an RC pulse-shaped waveform, which has zero ISI characteristics at maximum eye opening in the eye diagram of the waveform. Also, the matched filtering process maximizes the signal to noise power ratio (SNR) of the filter output.
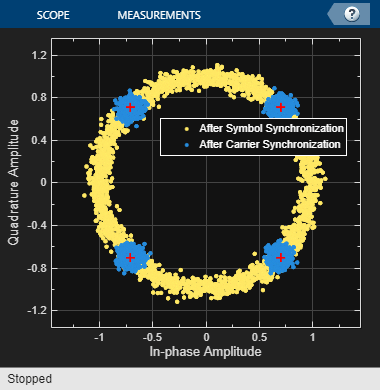
Frequency and Time Synchronizer
The Frequency and Time Synchronizer subsystem performs symbol synchronization, coarse frequency compensation, carrier synchronization, and preamble detection for packet synchronization. It also estimates and resolves the phase ambiguity that is left uncorrected in carrier synchronization.

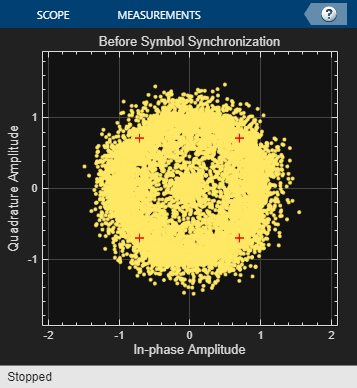
The Symbol Synchronizer subsystem is a PLL-based implementation. It generates samples at the optimum time instant (maximum eye opening instant) as described in Chapter 8.5 of [ 1 ]. The subsystem generates one output sample for every four input samples. The Interpolation Filter subsystem implements a piecewise parabolic interpolator with a hardware resource efficient farrow structure as described in Chapter 8.4.2, and the farrow coefficients are tabulated in Table 8.4.1 (the free parameter  of the coefficients is taken as 0.5) of [ 1 ]. This filter introduces fractional delays in the input waveform. The
of the coefficients is taken as 0.5) of [ 1 ]. This filter introduces fractional delays in the input waveform. The Gardner TED subsystem implements a Gardner timing error detector. The timing error detector is described in Chapter 8.4.1 of [ 1 ]. The Loop Filter subsystem filters the timing error and the timing error is passed on to the Interpolation Control function block. This block implements a mod-1 decrementing counter to calculate fractional delays based on the loop filtered timing error as described in Chapter 8.4.3 of [ 1 ] to generate interpolants at optimum sampling instants. The Rate Handle subsystem selects samples if there is a strobe signal and stores them in a FIFO. These samples correspond to the maximum eye opening of the eye diagram before symbol synchronization.

The Coarse Frequency Compensator subsystem raises the input sequence to a power of 4 in the Raise Power to 4 subsystem. This eliminates the QPSK phase mapping dependency in the input sequence but reduces the estimation range by a factor of 4. This sequence streams into the Coarse Frequency Estimator subsystem. The estimate obtained from the Coarse Frequency Estimator subsystem is divided by 4 to remove the factor 4 due to raising to power 4 and get the normalized coarse frequency estimate. This estimate drives the NCO (DSP HDL Toolbox) block to generate complex exponential phase that is conjugated and multiplied with the input sequence to correct the frequency offset.
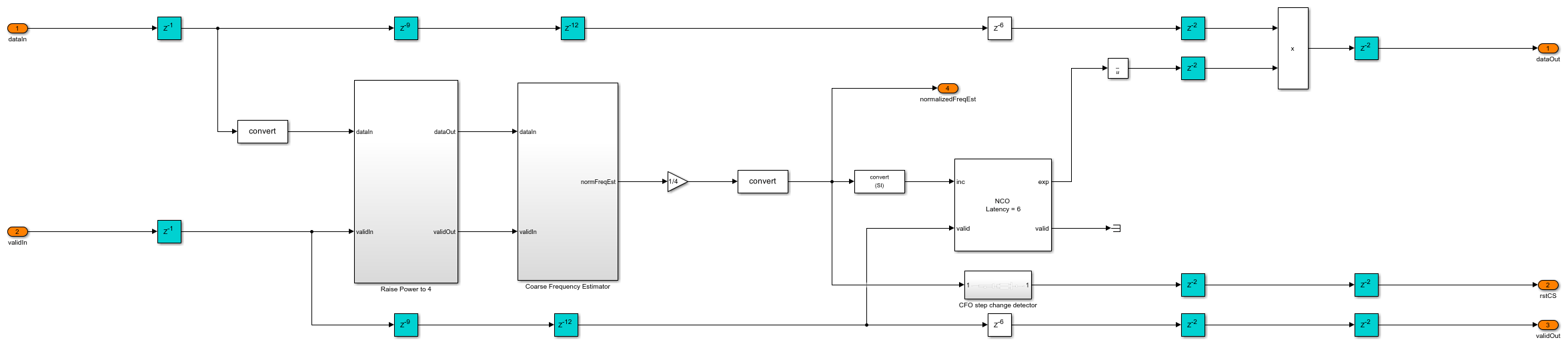
The Coarse Frequency Estimator subsystem differentially detects the input sequence and extracts the complex frequency offset estimate in the input. This estimate is averaged for 2^15 consecutive estimates in the Integrator subsystem to get the final complex estimate. The Complex to Magnitude-Angle (DSP HDL Toolbox) block extracts the frequency from the complex estimate in the Extract Frequency subsystem.
The frequency estimator estimates a normalized frequency (with respect to symbol rate) range of -0.125 to 0.125, which corresponds to a frequency offset range of -240 KHz to 240 KHz for a symbol rate of 1.92 Mbaud. The estimation accuracy is such that the residual frequency offset after coarse frequency offset correction is within the normalized frequency range of -0.0016 to 0.0016, which corresponds to a frequency offset range of -3 KHz to 3 KHz for a symbol rate of 1.92 Mbaud that the carrier synchronizer PLL converges.

The Carrier Synchronizer subsystem is a TYPE II PLL with a sinusoidal phase error detector, which operates at a 45 degrees operating point. The phase error detector is described in Chapter 7.2.2, and the design equations are described in the Appendix C of [ 1 ]. A detailed analysis of TYPE II PLL with a zero operating point sinusoidal phase detector is described in Chapter 4 of [ 2 ]. The sign function of the phase detector in the real and imaginary parts converts all of the angles in the 4 quadrants into a first-quadrant angle (0 to 90 degrees), which creates an ambiguity of 90,180,270 degrees for second (90 to 180 degrees), third (-180 to -90 degrees) and fourth (-90 to 0 degrees) quadrant angles, respectively. The phase error is calculated as a deviation from the operating point (45 degrees) of the phase detector. The proportional plus integrator filter in the Loop Filter subsystem filters the phase error. The loop filter sets the normalized loop bandwidth (normalized by the sample rate) and the loop damping factor. The default normalized loop bandwidth is set to 0.005, and the default damping factor is set to 0.7071. The filtered error is given as a phase increment source to the Direct Digital Synthesis subsystem, which uses the NCO (DSP HDL Toolbox) block for complex exponential phase generation. The complex exponential phase is used to correct the frequency and phase of the input. A detailed analysis of direct digital synthesis is described in Chapter 9.2.2 of [ 1 ].

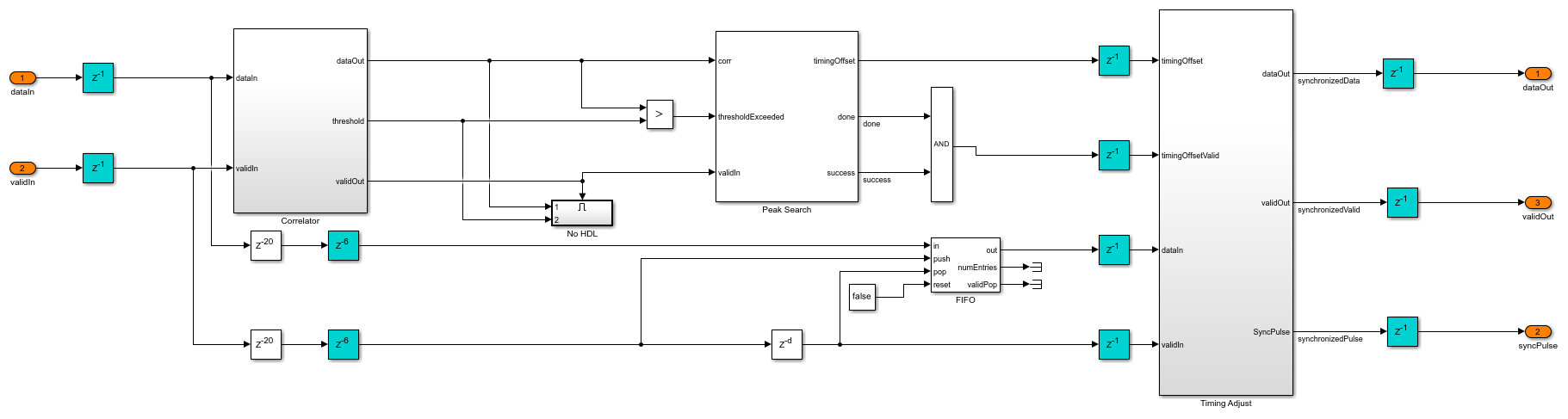
The Preamble Detector subsystem performs continuous correlation for the input with the Barker sequence. The correlation is implemented as convolution with the reversed Barker sequence as coefficients for the Discrete FIR Filter (DSP HDL Toolbox) block, and the magnitude of the correlated output is found using the Complex to Magnitude-Angle (DSP HDL Toolbox) block inside the Correlator subsystem. The magnitude of the correlation is compared with a threshold. The Peak Search subsystem begins searching for the maximum correlation peak that exceeded the threshold for every one frame duration and records the timing offset. The Timing Adjust subsystem synchronizes packet timing based on the timing offset to generate syncPulse signal, which indicates a packet synchronized sample to the subsequent subsystem.
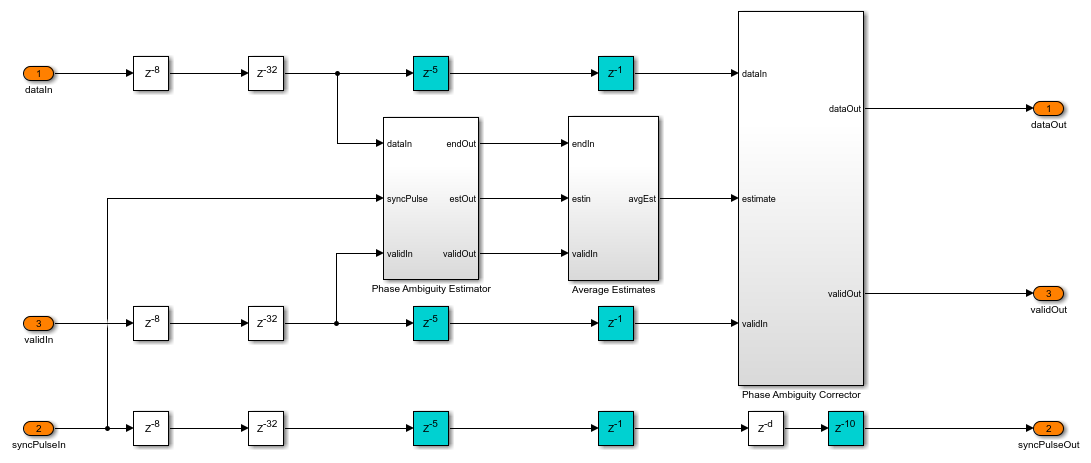
The Phase Ambiguity Estimation and Correction subsystem works based on the unique word method for phase ambiguity resolution described in Chapter 7.7.1 of [ 1 ]. This method uses the preamble sequence as the reference sequence. The reference sequence is conjugated and multiplied with the preamble sequence in the input, and the residual phase is extracted as the phase ambiguity estimate. This estimate is used to correct the ambiguity by rotating the constellation in the opposite direction of ambiguity.
The Packet Controller subsystem generates control signals for the packet boundaries.
QPSK Demodulator
The QPSK Demodulator subsystem uses the QPSK Demodulator Baseband block to demodulate the packet synchronized symbols and generate bits.

HDL Data Descrambler
The HDL Data Descrambler subsystem descrambles the demodulated bits to generate the user bits. This subsystem is same as the scrambler used at the transmitter side.
Run Model
Open the commhdlQPSKTxRx model. You can set custom data on the Input Data subsystem mask and set the channel configuration on the Channel subsystem mask. Run the model. After simulation, the QPSKTxRxVerification script verifies the commhdlQPSKTxRx model outputs. This script generates a reference waveform to compare it with the transmitter output, and compares the transmitted bits with the receiver decoded user bits.
Simulation completed Running the verification script QPSK Tx: Maximum absolute symbol error: Real:1.4496e-05 Imaginary:1.4496e-05 Maximum absolute RRC output error: Real:7.8708e-05 Imaginary:7.8708e-05 QPSK Rx: Initial frames not compared : 29 Number of packets missed = 0 out of 30 Number of packets false detected = 0 out of 30 Number of bits errored = 0 out of 67200

Generate HDL Code
To check and generate HDL code, you must have an HDL Coder™ license.
To generate the HDL code for the QPSK Tx and QPSK Rx subsystems, use the following commands:
makehdl('commhdlQPSKTxRx/QPSK Tx') and makehdl('commhdlQPSKTxRx/QPSK Rx')
To generate test bench, use the following commands:
makehdltb('commhdlQPSKTxRx/QPSK Tx') and makehdltb('commhdlQPSKTxRx/QPSK Rx')
Test bench generation time depends on the simulation time.
The resulting HDL code is synthesized for the AMD® Zynq®-7000 ZC706 evaluation board. The post place and route resource utilization is shown in this table. The maximum frequency of operation is 320 MHz for the transmitter and 196 MHz for the receiver.
Resources Tx Usage Rx Usage
_______________ ________ ________
Slice Registers 250 14303
Slice LUT 137 8884
RAMB36 0 5
RAMB18 1 1
DSP48 18 118
Further Exploration
You can modify the channel conditions by tuning the variables listed in the following table. You can change these values on the Channel subsystem mask in the commhdlQPSKTxRx model.
Variable Name Description
______________________ _______________________________________________________________________________________
fractionalTimingOffset Normalized timing phase offset specified in the range >= 0 and < 1
timingFrequencyOffset Timing frequency offset specified in PPM
EbN0dB Energy per information bit to single sided noise power spectral density specified in dB
CFO Carrier frequency offset specified in Hz
CPO Carrier phase offset specified in degrees
References
1. Michael Rice, Digital Communications - A Discrete-Time Approach, Prentice Hall, April 2008.
2. Floyd M.Gardner, Phaselock Techniques, Third Edition, John Wiley & Sons, Inc., 2005.