LTI System
在 Simulink 中使用线性时不变系统模型对象
库:
Control System Toolbox
描述
LTI System 模块将线性系统模型对象导入 Simulink® 环境中。您可以在 LTI 系统变量参数中指定要导入的 LTI 模型。您可以导入任何类型的适当线性时不变动态系统模型。如果导入的系统是状态空间 (ss) 模型,您可以在初始状态参数中指定初始状态值。
示例
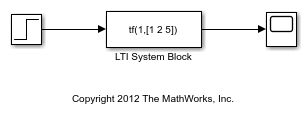
LTISystemBlockSimulation 模型展示如何使用 LTI System 模块来仿真 SISO 传递函数对阶跃输入的响应。
要为 LTI System 模块指定模型,请将 LTI 系统变量模块参数设置为以下任一值:
MATLAB® 工作区或模型工作区中某个 LTI 模型的变量名称,例如
sys。一个可计算为 LTI 模型的 MATLAB 表达式,例如
tf(1,[1 1])。
例如,您可以指定状态空间 (ss) 模型、零极点增益 (zpk) 模型或传递函数 (tf) 模型。您可以仿真 SISO 模型或 MIMO 模型,以及连续时间模型或离散时间模型。
在 LTISystemBlockSimulation 模型中,LTI 系统变量参数是 MATLAB 表达式 tf(1,[1 2 5]),它创建连续时间 SISO 传递函数。如果指定的系统是状态空间 (ss) 模型,您可以通过设置初始状态参数来指定初始状态值。
对模型进行仿真并检查示波器中的结果。
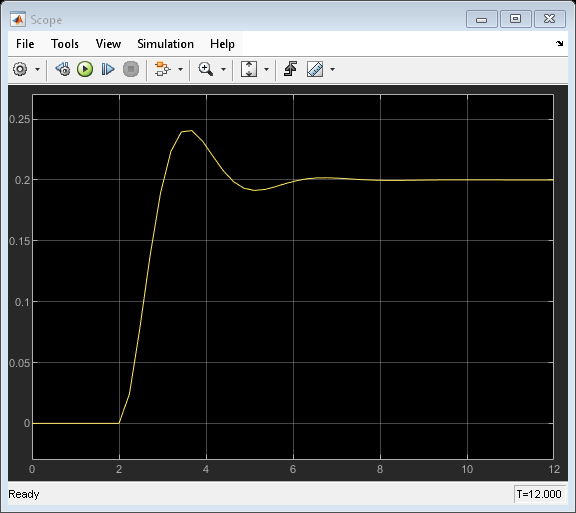
此示例仿真了系统在 t = 2 秒时对阶跃输入的响应。使用 LTI System 模块将 LTI 模型对象导入到 Simulink 模型中的任意位置,以仿真线性系统对任意输入的响应。
此模型展示如何在 Simulink® 中使用 LTI System 模块表示 MIMO 线性系统。
即使您为 LTI System 模块指定 MIMO 模型,该模块也只有一个输入和一个输出。在这种情况下,模块的输入和输出变为向量信号。例如,模型 LTISystemBlockMIMO 使用 LTI 系统模块表示控制系统中的 MIMO 被控对象。
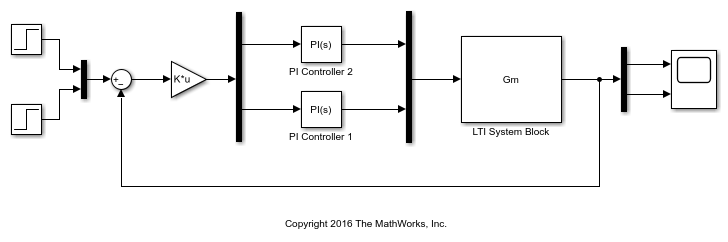
在此模型中,模块中指定的 LTI System 为 Gm,这是一个存储在模型工作区中的 2 输出、2 输入传递函数模型。Mux 模块将两个控制器输出组合成向量信号,作为 LTI System 模块的输入。类似地,Demux 模块将 LTI System 模块的向量输出分离为两个标量信号。
对模型进行仿真并检查示波器中的结果。
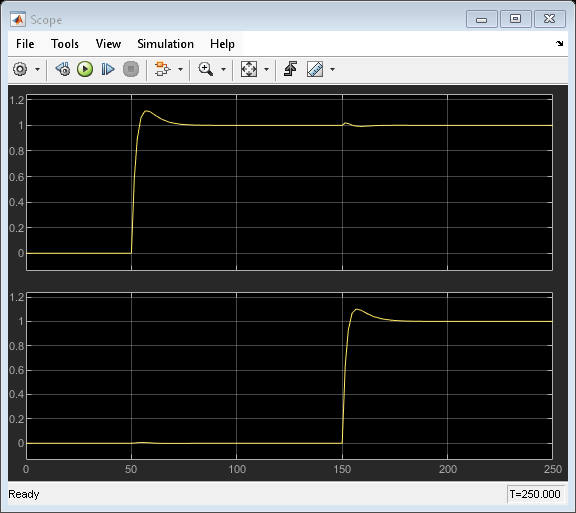
此示例仿真闭环系统对第一个输入在 t = 50 秒时的阶跃以及第二个输入在 t = 150 秒时的阶跃的响应。您可以在 Simulink 模型中任意需要插入 LTI 系统的位置使用 LTI 系统模块。