place
极点配置设计
说明
极点配置是一种计算最优增益矩阵的方法,用于将闭环极点分配给指定位置,从而确保系统稳定性。闭环极点位置会直接影响上升时间、稳定时间和瞬变振荡等时间响应特征。有关详细信息,请参阅极点配置。

从图中,假设有以下状态空间形式的线性动态系统:
对于期望的自共轭闭环极点位置的给定向量 p,place 计算增益矩阵 K,使得状态反馈 u = –Kx 将极点配置在位置 p。换句话说,A - BK 的特征值将匹配 p 的条目(取决于排序)。
示例
对于此示例,假设有一个具有以下状态空间矩阵的简单二阶系统:
输入矩阵并创建状态空间系统。
A = [-1,-2;1,0]; B = [2;0]; C = [0,1]; D = 0; sys = ss(A,B,C,D);
计算开环极点并检查开环系统的阶跃响应。
Pol = pole(sys)
Pol = 2×1 complex
-0.5000 + 1.3229i
-0.5000 - 1.3229i
figure(1)
step(sys)
hold on;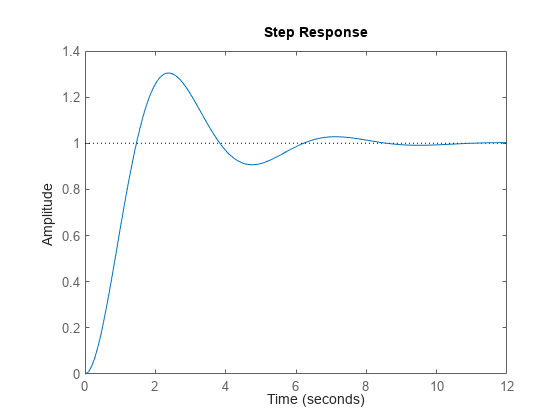
请注意,生成的系统为欠阻尼系统。因此,选择复平面左半部分的实极点来消除振荡。
p = [-1,-2];
使用极点配置求增益矩阵 K,并检查 syscl 的闭环极点。
K = place(A,B,p); Acl = A-B*K; syscl = ss(Acl,B,C,D); Pcl = pole(syscl)
Pcl = 2×1
-2.0000
-1.0000
现在,比较闭环系统的阶跃响应。
figure(1) step(syscl)
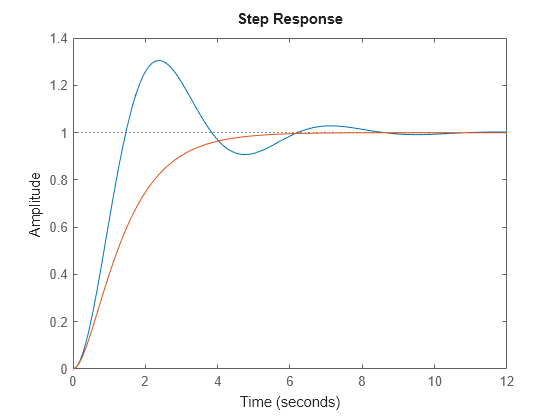
因此,使用极点配置获得的闭环系统是稳定的,具有良好的稳态响应。
请注意,选择远离虚轴的极点可以缩短响应时间,但会减小系统的稳态增益。例如,假设上述系统使用极点 [-2,-3]。
p = [-2, -3]; K2 = place(A,B,p); syscl2 = ss(A-B*K2,B,C,D); figure(1); step(syscl2);
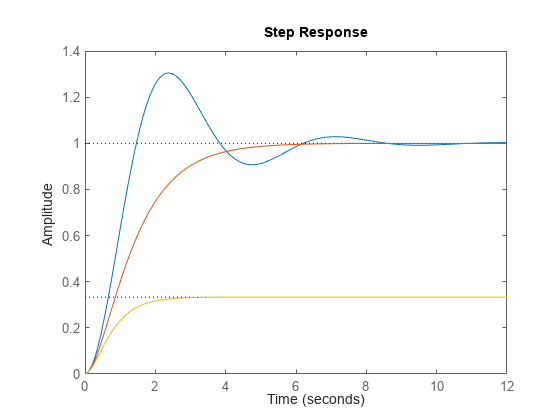
stepinfo(syscl)
ans = struct with fields:
RiseTime: 2.5901
TransientTime: 4.6002
SettlingTime: 4.6002
SettlingMin: 0.9023
SettlingMax: 0.9992
Overshoot: 0
Undershoot: 0
Peak: 0.9992
PeakTime: 7.7827
stepinfo(syscl2)
ans = struct with fields:
RiseTime: 1.4130
TransientTime: 2.4766
SettlingTime: 2.4766
SettlingMin: 0.3003
SettlingMax: 0.3331
Overshoot: 0
Undershoot: 0
Peak: 0.3331
PeakTime: 4.1216
在此示例中,假设极点位置为 [-2e-13,-3e-4,-3e-3]。计算实际极点的精确度。
A = [4,2,1;0,-1,2;0,1e-8,1]; B = [1,2;3,1;1e-6,0]; p = [-2e-13,-3e-4,3e-3]; [~,prec] = place(A,B,p)
prec = 2
获得的精确度值为 2,表示实际极点位置精确到小数点后 2 位。
对于此示例,假设有以下在 处具有复共轭极点的传递函数:
输入传递函数模型。然后,将其转换为状态空间形式,因为 place 使用 A 和 B 矩阵作为输入参量。
s = tf('s');
systf = 8/(s^2+4*s+2);
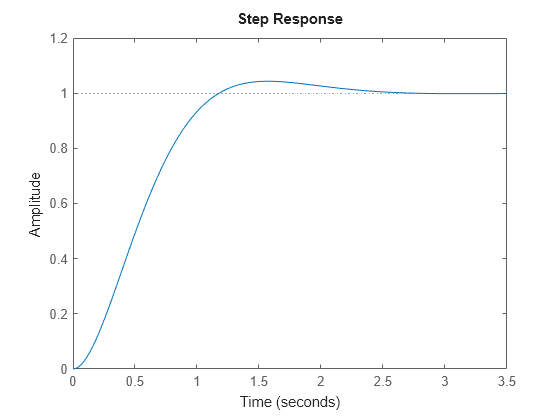
sys = ss(systf);接下来,使用复共轭极点计算增益矩阵 K。
p = [-2+2i,-2-2i]; K = place(sys.A,sys.B,p)
K = 1×2
0 1.5000
增益矩阵的值是实数,因为极点是自共轭极点。如果 p 不包含自共轭极点,则 K 的值将为复数。
现在,验证闭环系统的阶跃响应。
syscl = ss(sys.A-sys.B*K,sys.B,sys.C,sys.D); step(syscl)
对于此示例,假设有以下 SISO 状态空间模型:
创建由以下状态空间矩阵定义的 SISO 状态空间模型:
A = [-1,-0.75;1,0]; B = [1;0]; C = [1,1]; D = 0; Plant = ss(A,B,C,D);
现在,向被控对象提供一个脉冲,并使用 lsim 对其进行仿真。绘制输出。
N = 250;
t = linspace(0,25,N);
u = [ones(N/2,1); zeros(N/2,1)];
x0 = [1;2];
[y,t,x] = lsim(Plant,u,t,x0);
figure
plot(t,y);
title('Output');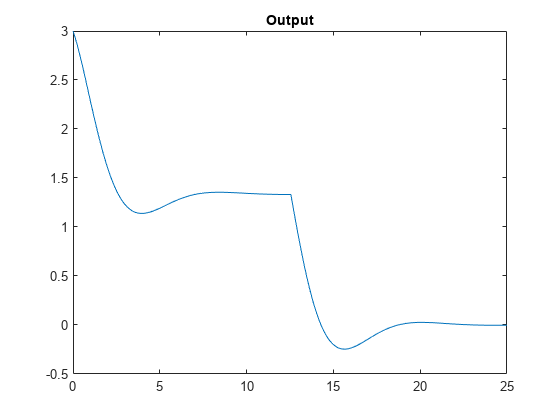
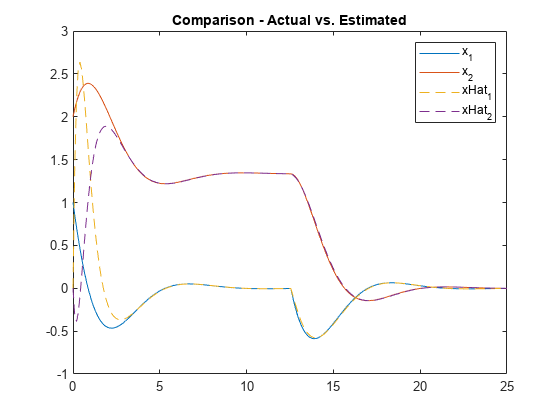
对于此示例,假设所有状态变量都无法测量,只有输出才能测量。因此,使用这种测量方法设计一个观测器。使用 place 来计算估计器增益,方法是转置 A 矩阵,并用 C' 代换矩阵 B。对于此实例,将所需的极点位置选为 -2 和 -3。
L = place(A',C',[-2,-3])';
使用估计器增益,依据对偶/分离原理代换状态矩阵,并创建估计的状态空间模型。
At = A-L*C; Bt = [B,L]; Ct = [C;eye(2)]; sysObserver = ss(At,Bt,Ct,0);
使用相同的脉冲输入对系统的时间响应进行仿真。
[observerOutput,t] = lsim(sysObserver,[u,y],t); yHat = observerOutput(:,1); xHat = observerOutput(:,[2 3]);
比较实际系统和估计系统的响应。
figure; plot(t,x); hold on; plot(t,xHat,'--'); legend('x_1','x_2','xHat_1','xHat_2') title('Comparison - Actual vs. Estimated');
输入参数
输出参量
参考
[1] Kautsky, J., N.K. Nichols, and P. Van Dooren, "Robust Pole Assignment in Linear State Feedback," International Journal of Control, 41 (1985), pp. 1129-1155.
[2] Laub, A.J. and M. Wette, Algorithms and Software for Pole Assignment and Observers, UCRL-15646 Rev. 1, EE Dept., Univ. of Calif., Santa Barbara, CA, Sept. 1984.
版本历史记录
在 R2006a 之前推出