actorprops
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
actorInfo = actorprops(tracklist,egoTrajectory)tracklist and ego trajectory data
egoTrajectory.
[
returns the location on disk actorInfo,writeLoc] = actorprops(tracklist,egoTrajectory)writeLoc where the
actorprops function stores the actor trajectory information.
[___] = actorprops(___,
specifies options using name-value arguments in addition to the arguments from the previous
syntaxes. For example, Name=Value)AgeThreshold=2 excludes actors with age less than
the specified age threshold of 2.
Note: This feature also requires the Sensor Fusion and Tracking Toolbox™.
Examples
Load a non-ego actor tracklist, waypoints, and time of arrival for the ego vehicle into the workspace.
data = load("recordedSensorData");Create a waypointTrajectory object for the ego vehicle.
egoTrajectory = waypointTrajectory(data.egoWaypoints, ... data.egoTimeOfArrival,ReferenceFrame="ENU");
Generate and display the actor properties table.
actorInfo = actorprops(data.actorTracklistData,egoTrajectory)
actorInfo=18×13 table
Age TrackID ClassID EntryTime ExitTime Mesh Time Waypoints Speed Roll Pitch Yaw IsStationary
___ _______ _______ _________ ________ ______________________ ______________ ______________ ______________ ______________ ______________ ______________ ____________
138 4 1 0.000383 6.8497 1×1 extendedObjectMesh {138×1 double} {138×3 double} {138×1 double} {138×1 double} {138×1 double} {138×1 double} false
261 13 1 0.000383 13.001 1×1 extendedObjectMesh {261×1 double} {261×3 double} {261×1 double} {261×1 double} {261×1 double} {261×1 double} false
51 22 1 0.000383 2.5007 1×1 extendedObjectMesh { 51×1 double} { 51×3 double} { 51×1 double} { 51×1 double} { 51×1 double} { 51×1 double} false
59 23 1 1.9999 4.8997 1×1 extendedObjectMesh { 59×1 double} { 59×3 double} { 59×1 double} { 59×1 double} { 59×1 double} { 59×1 double} false
6 24 1 3.0507 3.3003 1×1 extendedObjectMesh { 6×1 double} { 6×3 double} { 6×1 double} { 6×1 double} { 6×1 double} { 6×1 double} true
12 25 1 4.6997 5.2497 1×1 extendedObjectMesh { 12×1 double} { 12×3 double} { 12×1 double} { 12×1 double} { 12×1 double} { 12×1 double} false
167 26 1 5.1495 13.451 1×1 extendedObjectMesh {167×1 double} {167×3 double} {167×1 double} {167×1 double} {167×1 double} {167×1 double} false
65 28 1 6.5994 9.7999 1×1 extendedObjectMesh { 65×1 double} { 65×3 double} { 65×1 double} { 65×1 double} { 65×1 double} { 65×1 double} false
31 31 1 9.4507 10.951 1×1 extendedObjectMesh { 31×1 double} { 31×3 double} { 31×1 double} { 31×1 double} { 31×1 double} { 31×1 double} false
377 32 1 11.151 29.951 1×1 extendedObjectMesh {377×1 double} {377×3 double} {377×1 double} {377×1 double} {377×1 double} {377×1 double} false
5 33 1 12.002 12.2 1×1 extendedObjectMesh { 5×1 double} { 5×3 double} { 5×1 double} { 5×1 double} { 5×1 double} { 5×1 double} true
240 37 1 14.049 26 1×1 extendedObjectMesh {240×1 double} {240×3 double} {240×1 double} {240×1 double} {240×1 double} {240×1 double} false
5 38 1 14.3 14.5 1×1 extendedObjectMesh { 5×1 double} { 5×3 double} { 5×1 double} { 5×1 double} { 5×1 double} { 5×1 double} true
5 39 1 14.5 14.7 1×1 extendedObjectMesh { 5×1 double} { 5×3 double} { 5×1 double} { 5×1 double} { 5×1 double} { 5×1 double} true
8 40 1 26.2 26.55 1×1 extendedObjectMesh { 8×1 double} { 8×3 double} { 8×1 double} { 8×1 double} { 8×1 double} { 8×1 double} false
16 42 1 27.101 27.85 1×1 extendedObjectMesh { 16×1 double} { 16×3 double} { 16×1 double} { 16×1 double} { 16×1 double} { 16×1 double} false
⋮
Load a non-ego actor tracklist, waypoints, and time of arrival for the ego vehicle into the workspace.
data = load("recordedSensorData");Create a waypointTrajectory object for the ego vehicle.
egoTrajectory = waypointTrajectory(data.egoWaypoints, ... data.egoTimeOfArrival,ReferenceFrame="ENU");
Generate the actor properties table without specifying an age threshold.
actorInfo1 = actorprops(data.actorTracklistData,egoTrajectory);
Generate an actor properties table with a specified age threshold.
actorInfo2 = actorprops(data.actorTracklistData,egoTrajectory, ...
AgeThreshold=20);Display the number of actors in each property table. The number of actors in actorInfo2 is less as compared to the number of actors in actorInfo1.
numActorsInActorInfo1 = numel(actorInfo1.TrackID)
numActorsInActorInfo1 = 18
numActorsInActorInfo2 = numel(actorInfo2.TrackID)
numActorsInActorInfo2 = 10
Load a non-ego actor track list, waypoints, and time of arrival for the ego vehicle into the workspace.
data = load("recordedSensorData");Create a waypointTrajectory object for the ego vehicle.
egoTrajectory = waypointTrajectory(data.egoWaypoints, ... data.egoTimeOfArrival,ReferenceFrame="ENU");
Generate the actor properties table without smoothing waypoints.
actorInfo1 = actorprops(data.actorTracklistData,egoTrajectory);
Smooth actor waypoints by using the helperSmoothFcn function and generate the actor properties table.
actorInfo2 = actorprops(data.actorTracklistData,egoTrajectory,SmoothWaypoints=@helperSmoothFcn);
Display some sample of actor waypoints without smoothing and with smoothing.
figure
plot(actorInfo1.Waypoints{10,1}(1:50,1),actorInfo1.Waypoints{10,1}(1:50,2),LineWidth=2)
hold on
plot(actorInfo2.Waypoints{10,1}(1:50,1),actorInfo2.Waypoints{10,1}(1:50,2),LineWidth=2)
hold off
legend("Waypoints Without Smoothing","Waypoints With Smoothing")
xlabel("X-axis")
ylabel("Y-axis")
title("Actor Waypoints Smoothing")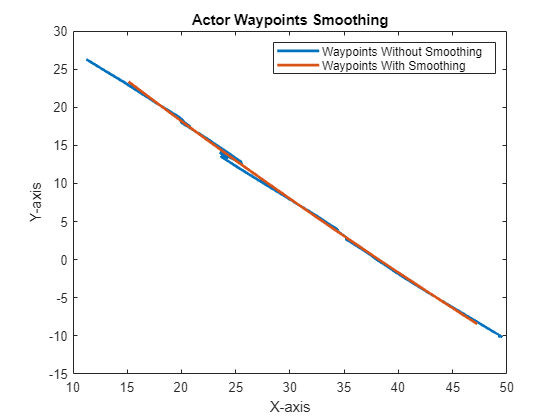
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2022bSee Also
actorTracklist | selectActorRoads | roadprops | waypointTrajectory (Sensor Fusion and Tracking Toolbox)