waypointTrajectory
Waypoint trajectory generator
Description
The waypointTrajectory
System object™ generates trajectories based on specified waypoints. When you create the
System object, you can choose to specify the time of arrival, velocity, or ground speed at
each waypoint. You can optionally specify other properties such as orientation at each
waypoint. See Algorithms for more details.
To generate a trajectory from waypoints:
Create the
waypointTrajectoryobject and set its properties.Call the object as if it were a function.
To learn more about how System objects work, see What Are System Objects?.
Creation
Syntax
Description
trajectory = waypointTrajectorytrajectory, that generates a trajectory based on default
stationary waypoints.
trajectory = waypointTrajectory(Waypoints,TimeOfArrival)TimeOfArrival property for more details.
Tip
When you specify the TimeOfArrival argument, you must not
specify these properties:
JerkLimitInitialTimeWaitTime
trajectory = waypointTrajectory(Waypoints,GroundSpeed=groundSpeed)GroundSpeed property for more details.
trajectory = waypointTrajectory(Waypoints,Velocities=velocities)Velocities property for more details.
trajectory = waypointTrajectory(___,Name=Value)
Example: trajectory =
waypointTrajectory([10,10,0;20,20,0;20,20,10],[0,0.5,10]) creates a waypoint
trajectory System object, trajectory, that starts at waypoint
[10,10,0], and then passes through [20,20,0] after
0.5 seconds and [20,20,10] after 10 seconds.
Properties
Usage
Description
[
outputs a frame of trajectory data based on specified creation arguments and
properties.position,orientation,velocity,acceleration,angularVelocity] = trajectory()
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
trajectory = waypointTrajectory
trajectory =
waypointTrajectory with properties:
SampleRate: 100
SamplesPerFrame: 1
Waypoints: [2×3 double]
TimeOfArrival: [2×1 double]
Velocities: [2×3 double]
Course: [2×1 double]
GroundSpeed: [2×1 double]
ClimbRate: [2×1 double]
Orientation: [2×1 quaternion]
AutoPitch: 0
AutoBank: 0
ReferenceFrame: 'NED'
Inspect the default waypoints and times of arrival by calling waypointInfo. By default, the waypoints indicate a stationary position for one second.
waypointInfo(trajectory)
ans=2×2 table
TimeOfArrival Waypoints
_____________ ___________
0 0 0 0
1 0 0 0
Create a square trajectory and examine the relationship between waypoint constraints, sample rate, and the generated trajectory.
Create a square trajectory by defining the vertices of the square. Define the orientation at each waypoint as pointing in the direction of motion. Specify a 1 Hz sample rate and use the default SamplesPerFrame of 1.
waypoints = [0,0,0; ... % Initial position 0,1,0; ... 1,1,0; ... 1,0,0; ... 0,0,0]; % Final position toa = 0:4; % time of arrival orientation = quaternion([0,0,0; ... 45,0,0; ... 135,0,0; ... 225,0,0; ... 0,0,0], ... "eulerd","ZYX","frame"); trajectory = waypointTrajectory(waypoints, ... TimeOfArrival=toa, ... Orientation=orientation, ... SampleRate=1);
Create a figure and plot the initial position of the platform.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") title("Position") grid on hold on
In a loop, step through the trajectory to output the current position and current orientation. Plot the current position and log the orientation. Use pause to mimic real-time processing.
orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end hold off
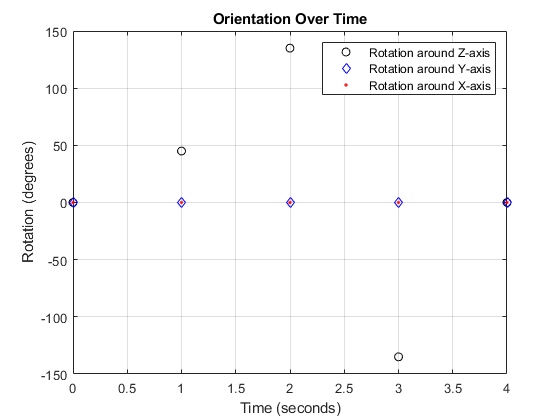
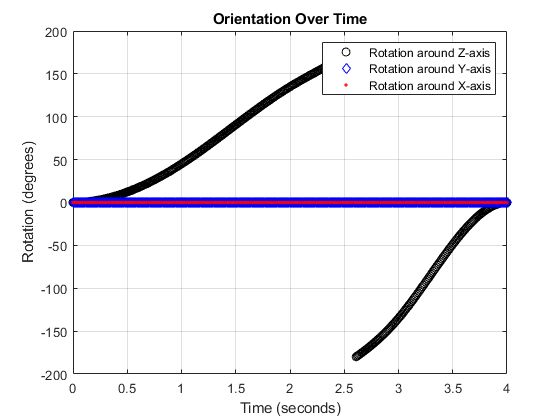
Convert the orientation quaternions to Euler angles for easy interpretation, and then plot orientation over time.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); plot(toa,eulerAngles(:,1),"ko", ... toa,eulerAngles(:,2),"bd", ... toa,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis","Rotation around Y-axis","Rotation around X-axis") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on
So far, the trajectory object has only output the waypoints that were specified during construction. To interpolate between waypoints, increase the sample rate to a rate faster than the time of arrivals of the waypoints. Set the trajectory sample rate to 100 Hz and call reset.
trajectory.SampleRate = 100; reset(trajectory)
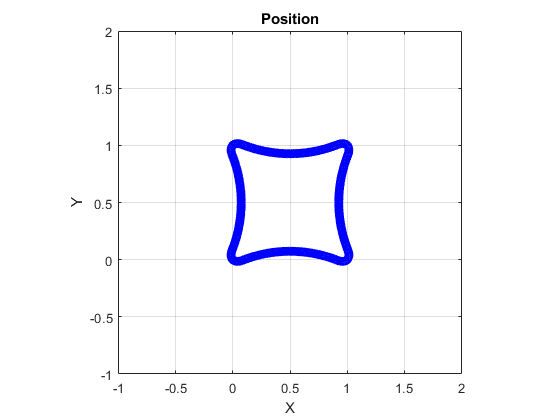
Create a figure and plot the initial position of the platform. In a loop, step through the trajectory to output the current position and current orientation. Plot the current position and log the orientation. Use pause to mimic real-time processing.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") title("Position") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") grid on hold on orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end hold off
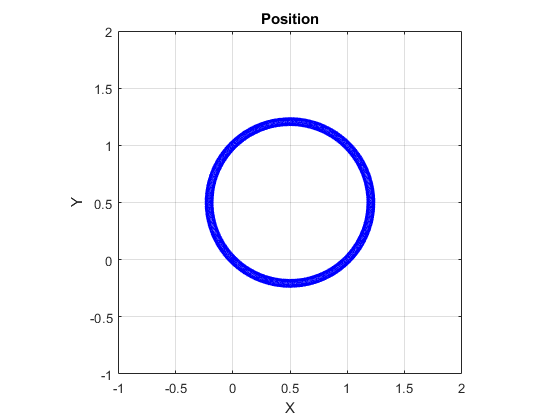
The trajectory output now appears circular. This is because the waypointTrajectory System object™ minimizes the acceleration and angular velocity when interpolating, which results in smoother, more realistic motions in most scenarios.
Convert the orientation quaternions to Euler angles for easy interpretation, and then plot orientation over time. The orientation is also interpolated.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); t = 0:1/trajectory.SampleRate:4; plot(t,eulerAngles(:,1),"ko", ... t,eulerAngles(:,2),"bd", ... t,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis","Rotation around Y-axis","Rotation around X-axis") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on
The waypointTrajectory algorithm interpolates the waypoints to create a smooth trajectory. To return to the square trajectory, provide more waypoints, especially around sharp changes. To track corresponding times, waypoints, and orientation, specify all the trajectory info in a single matrix.
% Time, Waypoint, Orientation trajectoryInfo = [0, 0,0,0, 0,0,0; ... % Initial position 0.1, 0,0.1,0, 0,0,0; ... 0.9, 0,0.9,0, 0,0,0; ... 1, 0,1,0, 45,0,0; ... 1.1, 0.1,1,0, 90,0,0; ... 1.9, 0.9,1,0, 90,0,0; ... 2, 1,1,0, 135,0,0; ... 2.1, 1,0.9,0, 180,0,0; ... 2.9, 1,0.1,0, 180,0,0; ... 3, 1,0,0, 225,0,0; ... 3.1, 0.9,0,0, 270,0,0; ... 3.9, 0.1,0,0, 270,0,0; ... 4, 0,0,0, 270,0,0]; % Final position trajectory = waypointTrajectory(trajectoryInfo(:,2:4), ... TimeOfArrival=trajectoryInfo(:,1), ... Orientation=quaternion(trajectoryInfo(:,5:end),"eulerd","ZYX","frame"), ... SampleRate=100);
Create a figure and plot the initial position of the platform. In a loop, step through the trajectory to output the current position and current orientation. Plot the current position and log the orientation. Use pause to mimic real-time processing.
figure(1) plot(waypoints(1,1),waypoints(1,2),"b*") title("Position") axis([-1,2,-1,2]) axis square xlabel("X") ylabel("Y") grid on hold on orientationLog = zeros(toa(end)*trajectory.SampleRate,1,"quaternion"); count = 1; while ~isDone(trajectory) [currentPosition,orientationLog(count)] = trajectory(); plot(currentPosition(1),currentPosition(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count+1; end hold off
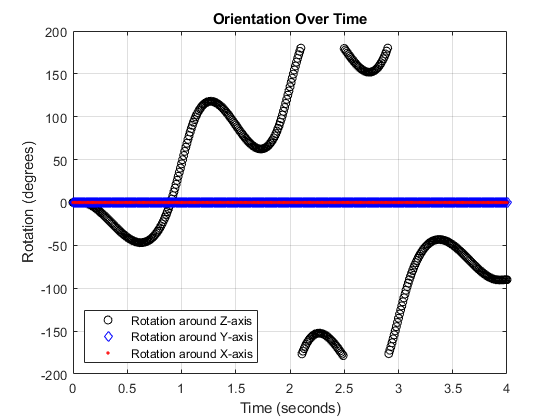
The trajectory output now appears more square-like, especially around the vertices with waypoints.
Convert the orientation quaternions to Euler angles for easy interpretation, and then plot orientation over time.
figure(2) eulerAngles = eulerd([orientation(1);orientationLog],"ZYX","frame"); t = 0:1/trajectory.SampleRate:4; eulerAngles = plot(t,eulerAngles(:,1),"ko", ... t,eulerAngles(:,2),"bd", ... t,eulerAngles(:,3),"r."); title("Orientation Over Time") legend("Rotation around Z-axis", ... "Rotation around Y-axis", ... "Rotation around X-axis", ... "Location", "SouthWest") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on
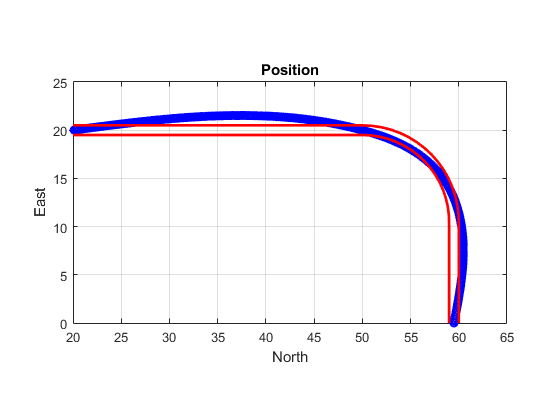
This example shows how to create an arc trajectory using the waypointTrajectory System object™. waypointTrajectory creates a path through specified waypoints that minimizes acceleration and angular velocity. After creating an arc trajectory, you restrict the trajectory to be within preset bounds.
Create an Arc Trajectory
Define a constraints matrix consisting of waypoints, times of arrival, and orientation for an arc trajectory. The generated trajectory passes through the waypoints at the specified times with the specified orientation. The waypointTrajectory System object requires orientation to be specified using quaternions or rotation matrices. Convert the Euler angles saved in the constraints matrix to quaternions when specifying the Orientation property.
% Arrival, Waypoints, Orientation constraints = [0, 20,20,0, 90,0,0; 3, 50,20,0, 90,0,0; 4, 58,15.5,0, 162,0,0; 5.5, 59.5,0,0 180,0,0]; trajectory = waypointTrajectory(constraints(:,2:4), ... TimeOfArrival=constraints(:,1), ... Orientation=quaternion(constraints(:,5:7),"eulerd","ZYX","frame"));
Call waypointInfo on trajectory to return a table of your specified constraints. The creation properties Waypoints, TimeOfArrival, and Orientation are variables of the table. The table is convenient for indexing while plotting.
tInfo = waypointInfo(trajectory)
tInfo=4×3 table
0 20 20 0 1×1 quaternion
3 50 20 0 1×1 quaternion
4 58 15.5000 0 1×1 quaternion
5.5000 59.5000 0 0 1×1 quaternion
The trajectory object outputs the current position, velocity, acceleration, and angular velocity at each call. Call trajectory in a loop and plot the position over time. Cache the other outputs.
figure(1) plot(tInfo.Waypoints(1,1),tInfo.Waypoints(1,2),"b*") title("Position") axis([20,65,0,25]) xlabel("North") ylabel("East") grid on daspect([1 1 1]) hold on orient = zeros(tInfo.TimeOfArrival(end)*trajectory.SampleRate,1,"quaternion"); vel = zeros(tInfo.TimeOfArrival(end)*trajectory.SampleRate,3); acc = vel; angVel = vel; count = 1; while ~isDone(trajectory) [pos,orient(count),vel(count,:),acc(count,:),angVel(count,:)] = trajectory(); plot(pos(1),pos(2),"bo") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end
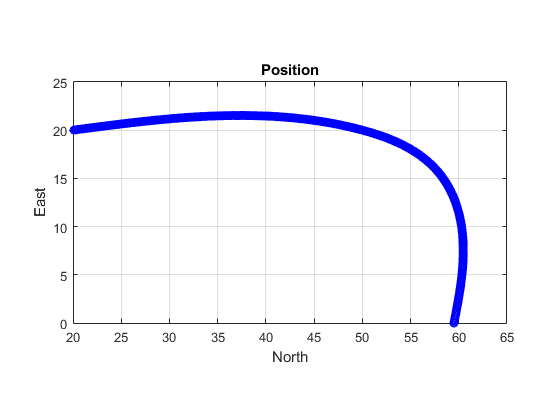
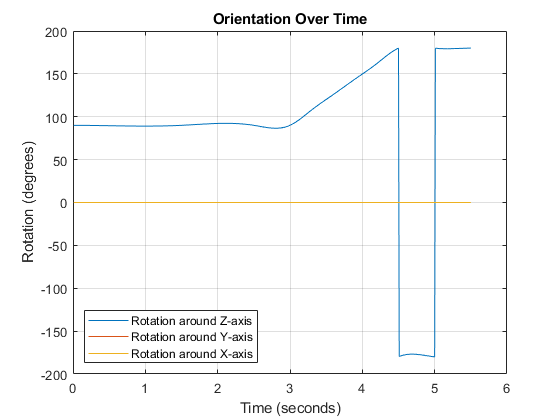
Inspect the orientation, velocity, acceleration, and angular velocity over time. The waypointTrajectory System object™ creates a path through the specified constraints that minimized acceleration and angular velocity.
figure(2)
timeVector = 0:(1/trajectory.SampleRate):tInfo.TimeOfArrival(end);
eulerAngles = eulerd([tInfo.Orientation{1};orient],"ZYX","frame");
plot(timeVector,eulerAngles(:,1), ...
timeVector,eulerAngles(:,2), ...
timeVector,eulerAngles(:,3));
title("Orientation Over Time")
legend("Rotation around Z-axis", ...
"Rotation around Y-axis", ...
"Rotation around X-axis", ...
"Location","southwest")
xlabel("Time (seconds)")
ylabel("Rotation (degrees)")
grid on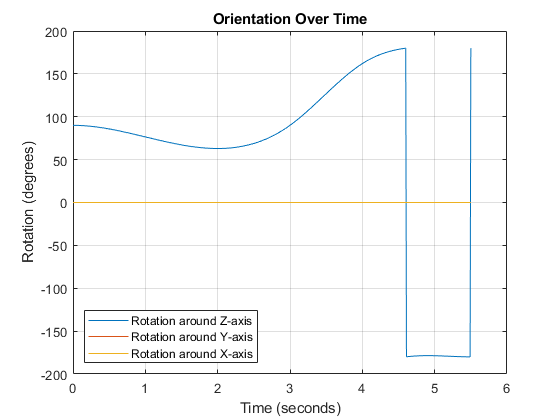
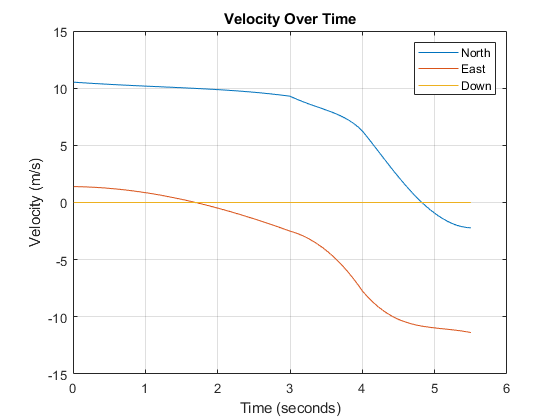
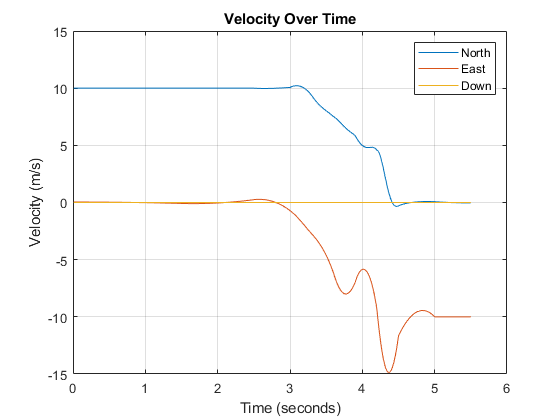
figure(3) plot(timeVector(2:end),vel(:,1), ... timeVector(2:end),vel(:,2), ... timeVector(2:end),vel(:,3)); title("Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Velocity (m/s)") grid on
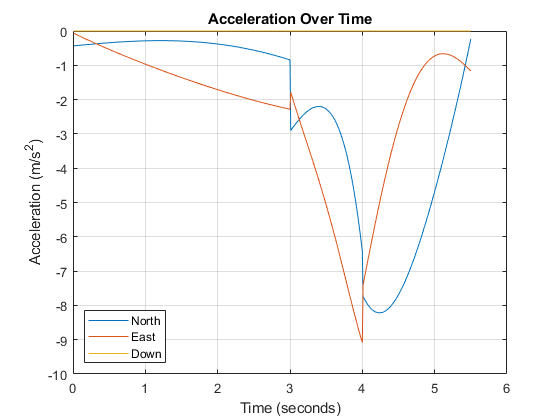
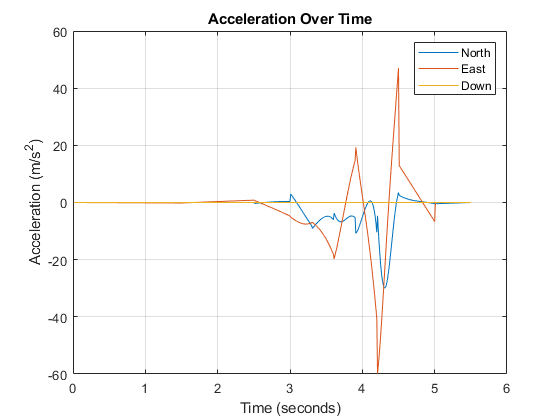
figure(4) plot(timeVector(2:end),acc(:,1), ... timeVector(2:end),acc(:,2), ... timeVector(2:end),acc(:,3)); title("Acceleration Over Time") legend("North","East","Down","Location","southwest") xlabel("Time (seconds)") ylabel("Acceleration (m/s^2)") grid on
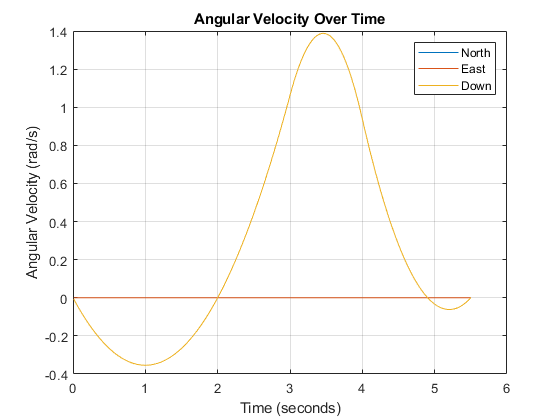
figure(5) plot(timeVector(2:end),angVel(:,1), ... timeVector(2:end),angVel(:,2), ... timeVector(2:end),angVel(:,3)); title("Angular Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Angular Velocity (rad/s)") grid on
Restrict Arc Trajectory Within Preset Bounds
You can specify additional waypoints to create trajectories within given bounds. Create upper and lower bounds for the arc trajectory.
figure(1) xUpperBound = [(20:50)';50+10*sin(0:0.1:pi/2)';60*ones(11,1)]; yUpperBound = [20.5.*ones(31,1);10.5+10*cos(0:0.1:pi/2)';(10:-1:0)']; xLowerBound = [(20:49)';50+9*sin(0:0.1:pi/2)';59*ones(11,1)]; yLowerBound = [19.5.*ones(30,1);10.5+9*cos(0:0.1:pi/2)';(10:-1:0)']; plot(xUpperBound,yUpperBound,"r","LineWidth",2); plot(xLowerBound,yLowerBound,"r","LineWidth",2)
To create a trajectory within the bounds, add additional waypoints. Create a new waypointTrajectory System object™, and then call it in a loop to plot the generated trajectory. Cache the orientation, velocity, acceleration, and angular velocity output from the trajectory object.
% Time, Waypoint, Orientation constraints = [0, 20,20,0, 90,0,0; 1.5, 35,20,0, 90,0,0; 2.5 45,20,0, 90,0,0; 3, 50,20,0, 90,0,0; 3.3, 53,19.5,0, 108,0,0; 3.6, 55.5,18.25,0, 126,0,0; 3.9, 57.5,16,0, 144,0,0; 4.2, 59,14,0, 162,0,0; 4.5, 59.5,10,0 180,0,0; 5, 59.5,5,0 180,0,0; 5.5, 59.5,0,0 180,0,0]; trajectory = waypointTrajectory(constraints(:,2:4), ... TimeOfArrival=constraints(:,1), ... Orientation=quaternion(constraints(:,5:7),"eulerd","ZYX","frame")); tInfo = waypointInfo(trajectory); figure(1) plot(tInfo.Waypoints(1,1),tInfo.Waypoints(1,2),"b*") count = 1; while ~isDone(trajectory) [pos,orient(count),vel(count,:),acc(count,:),angVel(count,:)] = trajectory(); plot(pos(1),pos(2),"gd") pause(trajectory.SamplesPerFrame/trajectory.SampleRate) count = count + 1; end
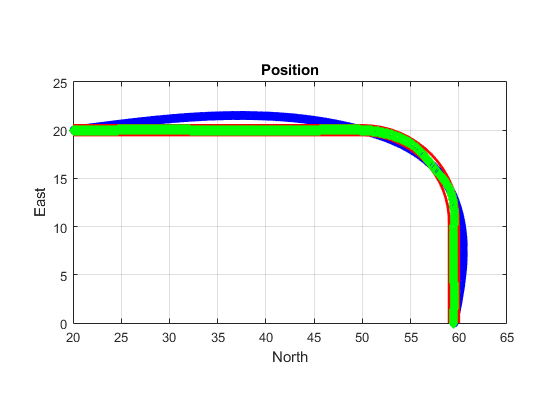
The generated trajectory now fits within the specified boundaries. Visualize the orientation, velocity, acceleration, and angular velocity of the generated trajectory.
figure(2) timeVector = 0:(1/trajectory.SampleRate):tInfo.TimeOfArrival(end); eulerAngles = eulerd(orient,"ZYX","frame"); plot(timeVector(2:end),eulerAngles(:,1), ... timeVector(2:end),eulerAngles(:,2), ... timeVector(2:end),eulerAngles(:,3)); title("Orientation Over Time") legend("Rotation around Z-axis", ... "Rotation around Y-axis", ... "Rotation around X-axis", ... "Location","southwest") xlabel("Time (seconds)") ylabel("Rotation (degrees)") grid on
figure(3) plot(timeVector(2:end),vel(:,1), ... timeVector(2:end),vel(:,2), ... timeVector(2:end),vel(:,3)); title("Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Velocity (m/s)") grid on
figure(4) plot(timeVector(2:end),acc(:,1), ... timeVector(2:end),acc(:,2), ... timeVector(2:end),acc(:,3)); title("Acceleration Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Acceleration (m/s^2)") grid on
figure(5) plot(timeVector(2:end),angVel(:,1), ... timeVector(2:end),angVel(:,2), ... timeVector(2:end),angVel(:,3)); title("Angular Velocity Over Time") legend("North","East","Down") xlabel("Time (seconds)") ylabel("Angular Velocity (rad/s)") grid on
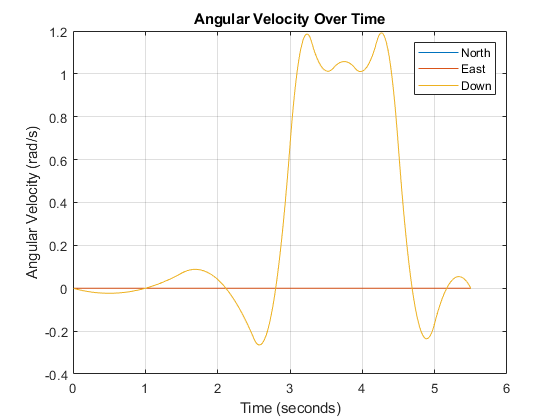
Note that while the generated trajectory now fits within the spatial boundaries, the acceleration and angular velocity of the trajectory are more erratic because the waypoints are overly specified.
Consider a racetrack trajectory as the following.
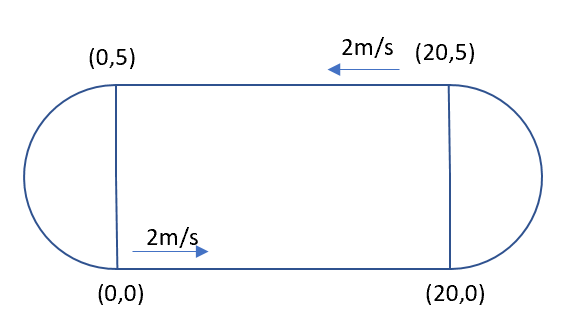
The four corner points of the trajectory are (0,0,0), (20,0,0), (20,5,0) and (0,5,0) in meters, respectively. Therefore, specify the waypoints of a loop as:
wps = [0 0 0;
20 0 0;
20 5 0;
0 5 0;
0 0 0];Assume the trajectory has a constant speed of 2 m/s, and thus the velocities at the five waypoints are:
vels = [2 0 0;
2 0 0;
-2 0 0;
-2 0 0;
2 0 0];The time of arrival for the five waypoints is:
t = cumsum([0 20/2 5*pi/2/2 20/2 5*pi/2/2]');
The orientation of the trajectory at the five waypoints are:
eulerAngs = [0 0 0;
0 0 0;
180 0 0;
180 0 0;
0 0 0]; % Angles in degrees.
% Convert Euler angles to quaternions.
quats = quaternion(eulerAngs,"eulerd","ZYX","frame");Specify the sample rate as 100 for smoothing trajectory lines.
fs = 100;
Construct the waypointTrajectory.
traj = waypointTrajectory(wps,SampleRate=fs, ... Velocities=vels,... TimeOfArrival=t,... Orientation=quats);
Sample and plot the trajectory.
[pos, orient, vel, acc, angvel] = traj(); i = 1; spf = traj.SamplesPerFrame; while ~isDone(traj) idx = (i+1):(i+spf); [pos(idx,:), orient(idx,:), ... vel(idx,:), acc(idx,:), angvel(idx,:)] = traj(); i = i+spf; end
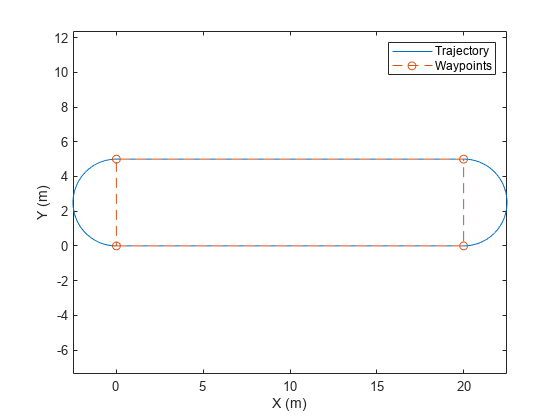
Plot the trajectory and the specified waypoints.
plot(pos(:,1),pos(:,2), wps(:,1),wps(:,2), "--o") xlabel("X (m)") ylabel("Y (m)") zlabel("Z (m)") legend({"Trajectory", "Waypoints"}) axis equal
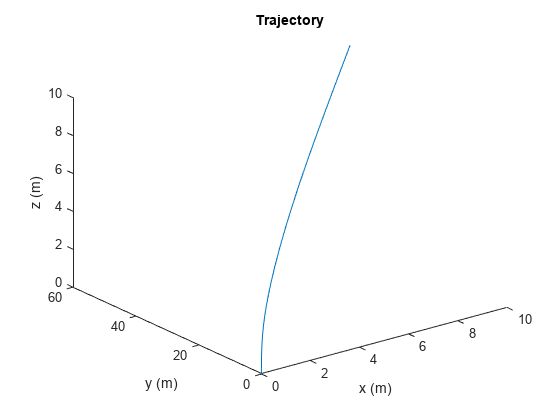
Create a waypointTrajectory object that connects two waypoints. The velocity of the trajectory at the two waypoints is 0 and 10 , respectively. Restrict the jerk limit to 0.5 to enable the trapezoidal acceleration profile.
waypoints = [0 0 0;
10 50 10];
speeds = [0 10];
jerkLimit = 0.5;
trajectory = waypointTrajectory(waypoints,GroundSpeed=speeds,JerkLimit=jerkLimit);Obtain the initial time and final time of the trajectory by querying the TimeOfArrival property. Create time stamps to sample the trajectory.
t0 = trajectory.TimeOfArrival(1); tf = trajectory.TimeOfArrival(end); sampleTimes = linspace(t0,tf,100);
Obtain the position, velocity, and acceleration information at these sampled time stamps using the lookupPose object function.
[position,~,velocity,acceleration,~] = lookupPose(trajectory,sampleTimes);
Plot the trajectory.
figure() plot3(position(:,1),position(:,2),position(:,3)) xlabel("x (m)") ylabel("y (m)") zlabel("z (m)") title("Trajectory")
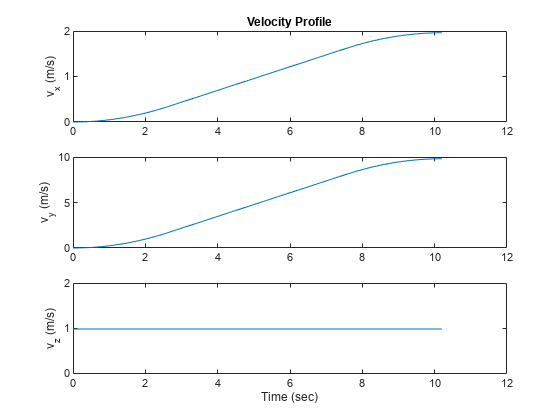
Plot the velocity profile.
figure() subplot(3,1,1) plot(sampleTimes,velocity(:,1)); ylabel("v_x (m/s)") title("Velocity Profile") subplot(3,1,2) plot(sampleTimes,velocity(:,2)); ylabel("v_y (m/s)") subplot(3,1,3) plot(sampleTimes,velocity(:,3)); ylabel("v_z (m/s)") xlabel("Time (sec)")
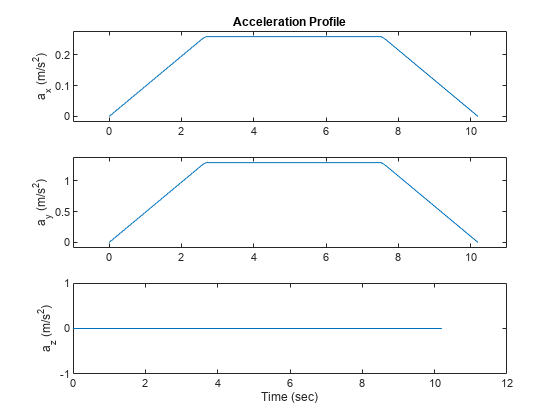
Plot the acceleration profile. From the results, the acceleration profile of the planar motion is trapezoidal.
figure() subplot(3,1,1) plot(sampleTimes,acceleration(:,1)); axis padded ylabel("a_x (m/s^2)") title("Acceleration Profile") subplot(3,1,2) plot(sampleTimes,acceleration(:,2)); ylabel("a_y (m/s^2)") axis padded subplot(3,1,3) plot(sampleTimes,acceleration(:,3)); ylabel("a_z (m/s^2)") xlabel("Time (sec)")
Algorithms
The waypointTrajectory
System object defines a trajectory that smoothly passes through waypoints. The trajectory
connects the waypoints through an interpolation that assumes the gravity direction expressed
in the trajectory reference frame is constant. Generally, you can use
waypointTrajectory to model platform or vehicle trajectories within a hundreds of
kilometers distance span.
The planar path of the trajectory (the x-y plane
projection) consists of piecewise, clothoid curves. The curvature of the curve between two
consecutive waypoints varies linearly with the curve length between them. The tangent
direction of the path at each waypoint is chosen to minimize discontinuities in the curvature,
unless the course is specified explicitly via the Course property or
implicitly via the Velocities property. Once the path is established, the
object uses cubic Hermite interpolation to compute the location of the vehicle throughout the
path as a function of time and the planar distance traveled. If the
JerkLimit property is specified, the objects produces a horizontal
trapezoidal acceleration profile for any segment that is between two waypoints. The
trapezoidal acceleration profile consists of three subsegments:
A constant-magnitude jerk subsegment
A constant-magnitude acceleration subsegment
A constant-magnitude jerk subsegment
The normal component (z-component) of the trajectory is subsequently
chosen to satisfy a shape-preserving piecewise spline (PCHIP) unless the climb rate is
specified explicitly via the ClimbRate property or the third column of
the Velocities property. Choose the sign of the climb rate based on the
selected ReferenceFrame:
When an 'ENU' reference frame is selected, specifying a positive climb rate results in an increasing value of z.
When an 'NED' reference frame is selected, specifying a positive climb rate results in a decreasing value of z.
You can define the orientation of the vehicle through the path in two primary ways:
If the
Orientationproperty is specified, then the object uses a piecewise-cubic, quaternion spline to compute the orientation along the path as a function of time.If the
Orientationproperty is not specified, then the yaw of the vehicle is always aligned with the path. The roll and pitch are then governed by theAutoBankandAutoPitchproperty values, respectively.AutoBankAutoPitchDescription falsefalseThe vehicle is always level (zero pitch and roll). This is typically used for large marine vessels. falsetrueThe vehicle pitch is aligned with the path, and its roll is always zero. This is typically used for ground vehicles. truefalseThe vehicle pitch and roll are chosen so that its local z-axis is aligned with the net acceleration (including gravity). This is typically used for rotary-wing craft. truetrueThe vehicle roll is chosen so that its local transverse plane aligns with the net acceleration (including gravity). The vehicle pitch is aligned with the path. This is typically used for two-wheeled vehicles and fixed-wing aircraft.