record
Run driving scenario and record actor states
Syntax
Description
Examples
Create a driving scenario in which one car passes a stationary car on a two-lane road.
scenario = drivingScenario; road(scenario,[0 0; 10 0; 53 -20],'lanes',lanespec(2)); plot(scenario,'Waypoints','on'); stationaryCar = vehicle(scenario,'ClassID',1,'Position',[25 -5.5 0],'Yaw',-22); passingCar = vehicle(scenario,'ClassID',1); waypoints = [1 -1.5; 16.36 -2.5; 17.35 -2.765; ... 23.83 -2.01; 24.9 -2.4; 50.5 -16.7]; speed = 15; % m/s smoothTrajectory(passingCar,waypoints,speed);
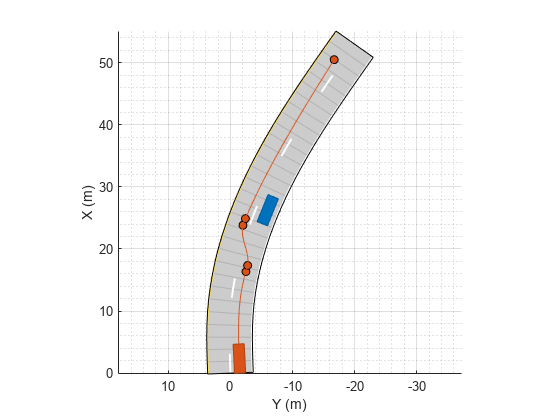
Record the driving scenario simulation.
rec = record(scenario);
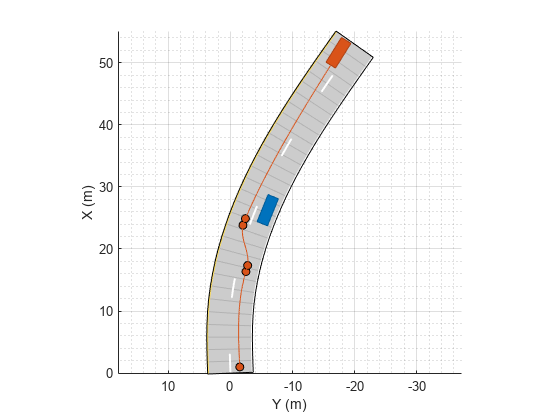
Compare the recorded poses of the passing car at the start and end of the simulation.
rec(1).ActorPoses(2)
ans = struct with fields:
ActorID: 2
Position: [1 -1.5000 0]
Velocity: [14.9816 0.7423 0]
Roll: 0
Pitch: 0
Yaw: 2.8367
AngularVelocity: [0 0 1.2537e-05]
rec(end).ActorPoses(2)
ans = struct with fields:
ActorID: 2
Position: [50.4717 -16.6823 0]
Velocity: [12.7171 -7.9546 0]
Roll: 0
Pitch: 0
Yaw: -32.0261
AngularVelocity: [0 0 -0.0099]