targetPoses
Target positions and orientations relative to host vehicle
Description
poses = targetPoses(ac)ac. See Ego Vehicle and Targets for more
details.
Examples
In a simple driving scenario, obtain the poses of target vehicles in the coordinate system of the ego vehicle. Then convert these poses back to the world coordinates of the driving scenario.
Create a driving scenario.
scenario = drivingScenario;
Create target actors.
actor(scenario,'ClassID',1, ... 'Position',[10 20 30], ... 'Velocity',[12 113 14], ... 'Yaw',54, ... 'Pitch',25, ... 'Roll',22, ... 'AngularVelocity',[24 42 27]);
Warning: Class ID 1 is not supported for an actor. The drivingScenario object created a vehicle instead. ClassID of actor must be one of these values: 3 (Bicycle), 4 (Pedestrian), 5 (Jersey Barrier), or 6 (Guardrail).
actor(scenario,'ClassID',1, ... 'Position',[17 22 12], ... 'Velocity',[19 13 15], ... 'Yaw',45, ... 'Pitch',52, ... 'Roll',2, ... 'AngularVelocity',[42 24 29]);
Warning: Class ID 1 is not supported for an actor. The drivingScenario object created a vehicle instead. ClassID of actor must be one of these values: 3 (Bicycle), 4 (Pedestrian), 5 (Jersey Barrier), or 6 (Guardrail).
Add an ego vehicle actor.
egoActor = actor(scenario,'ClassID',1, ... 'Position',[1 2 3], ... 'Velocity',[1.2 1.3 1.4], ... 'Yaw',4, ... 'Pitch',5, ... 'Roll',2, ... 'AngularVelocity',[4 2 7]);
Warning: Class ID 1 is not supported for an actor. The drivingScenario object created a vehicle instead. ClassID of actor must be one of these values: 3 (Bicycle), 4 (Pedestrian), 5 (Jersey Barrier), or 6 (Guardrail).
Use the actorPoses function to return the poses of all actors in the scenario. Pose properties (position, velocity, and orientation) are in the world coordinates of the driving scenario. Save the target actors to a separate variable and inspect the pose of the first target actor.
allPoses = actorPoses(scenario); targetPosesScenarioCoords = allPoses(1:2); targetPosesScenarioCoords(1)
ans = struct with fields:
ActorID: 1
Position: [10 20 30]
Velocity: [12 113 14]
Roll: 22
Pitch: 25
Yaw: 54
AngularVelocity: [24 42 27]
Use the driving.scenario.targetsToEgo function to convert the target poses to the ego-centric coordinates of the ego actor. Inspect the pose of the first actor.
targetPosesEgoCoords = driving.scenario.targetsToEgo(targetPosesScenarioCoords,egoActor); targetPosesEgoCoords(1)
ans = struct with fields:
ActorID: 1
Position: [7.8415 18.2876 27.1675]
Velocity: [18.6826 112.0403 9.2960]
Roll: 16.4327
Pitch: 23.2186
Yaw: 47.8114
AngularVelocity: [-3.3744 47.3021 18.2569]
Alternatively, use the targetPoses function to obtain all target actor poses in ego vehicle coordinates. Display the first target pose, which matches the previously calculated pose.
targetPosesEgoCoords = targetPoses(egoActor); targetPosesEgoCoords(1)
ans = struct with fields:
ActorID: 1
ClassID: 1
Position: [7.8415 18.2876 27.1675]
Velocity: [18.6826 112.0403 9.2960]
Roll: 16.4327
Pitch: 23.2186
Yaw: 47.8114
AngularVelocity: [-3.3744 47.3021 18.2569]
Use the driving.scenario.targetsToScenario to convert the target poses back to the world coordinates of the scenario. Display the first target pose, which matches the original target pose.
targetPosesScenarioCoords = driving.scenario.targetsToScenario(targetPosesEgoCoords,egoActor); targetPosesScenarioCoords(1)
ans = struct with fields:
ActorID: 1
ClassID: 1
Position: [10.0000 20.0000 30.0000]
Velocity: [12.0000 113.0000 14.0000]
Roll: 22
Pitch: 25.0000
Yaw: 54
AngularVelocity: [24.0000 42.0000 27.0000]
Obtain the poses of targets that are within the maximum range of a sensor mounted to the ego vehicle.
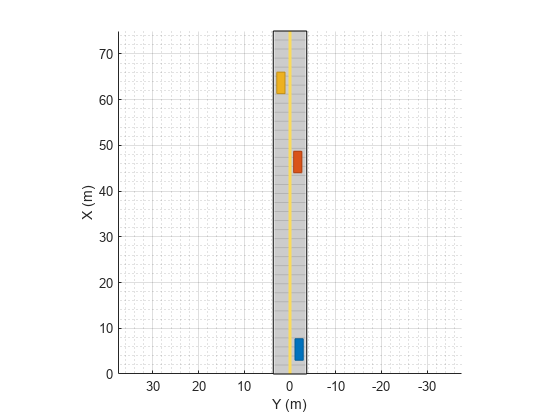
Create a driving scenario. The scenario contains a 75-meter straight road, an ego vehicle, and two target vehicles.
The nearest target vehicle is 45 meters away and in the same lane as the ego vehicle.
The farthest target vehicle is 65 meters away and in the opposite lane of the ego vehicle.
Plot the driving scenario.
scenario = drivingScenario; roadCenters = [0 0 0; 75 0 0]; laneSpecification = lanespec([1 1]); road(scenario,roadCenters,'Lanes',laneSpecification,'Name','Road'); egoVehicle = vehicle(scenario, ... 'ClassID',1, ... 'Position',[4 -2 0], ... 'Name','Ego'); vehicle(scenario, ... 'ClassID',1, ... 'Position',[45 -1.7 0], ... 'Name','Near Target'); vehicle(scenario, ... 'ClassID',1, ... 'Position',[65 2 0], ... 'Yaw',-180, ... 'Name','Far Target'); plot(scenario)
Create a vision sensor mounted to the front bumper of the ego vehicle. Configure the sensor to have a maximum detection range of 50 meters.
sensor = visionDetectionGenerator('SensorIndex',1, ... 'SensorLocation',[3.7 0], ... 'MaxRange',50);
Plot the outlines of the vehicles and the coverage area of the sensor. The nearest target vehicle is within range of the sensor but the farthest target vehicle is not.
bep = birdsEyePlot; olPlotter = outlinePlotter(bep); [position,yaw,length,width,originOffset,color] = targetOutlines(egoVehicle); plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color) caPlotter = coverageAreaPlotter(bep,'DisplayName','Coverage area','FaceColor','blue'); mountPosition = sensor.SensorLocation; range = sensor.MaxRange; orientation = sensor.Yaw; fieldOfView = sensor.FieldOfView(1); plotCoverageArea(caPlotter,mountPosition,range,orientation,fieldOfView);

Obtain the poses of targets that are within the range of the sensor. The output structure contains the pose of only the nearest target, which is under 50 meters away from the ego vehicle.
poses = targetPoses(egoVehicle,range)
poses = struct with fields:
ActorID: 2
ClassID: 1
Position: [41 0.3000 0]
Velocity: [0 0 0]
Roll: 0
Pitch: 0
Yaw: 0
AngularVelocity: [0 0 0]
In this example, you will add sensors to a driving scenario using the addSensors function and get ground-truth target poses based on the individual sensor inputs. Then, you process the ground-truth target poses into detections and visualize them.
Set Up Driving Scenario and Bird's-Eye-Plot
Create a driving scenario with an ego vehicle and two target vehicles. One target vehicle is in the front and the other is to the left of the ego-vehicle.
[scenario, egovehicle] = helperCreateDrivingScenario;
Configure a vision sensor to be mounted at the front of the ego vehicle.
visionSensor = visionDetectionGenerator(SensorIndex=1,SensorLocation=[4.0 0],Height=1.1,Pitch=1.0,DetectorOutput="Objects only");Configure an ultrasonic sensor to be mounted at the left side of the ego-vehicle.
leftUltrasonic = ultrasonicDetectionGenerator(SensorIndex=2,MountingLocation=[0.5 1 0.2],MountingAngles=[90 0 0],FieldOfView=[70 35],UpdateRate=100);
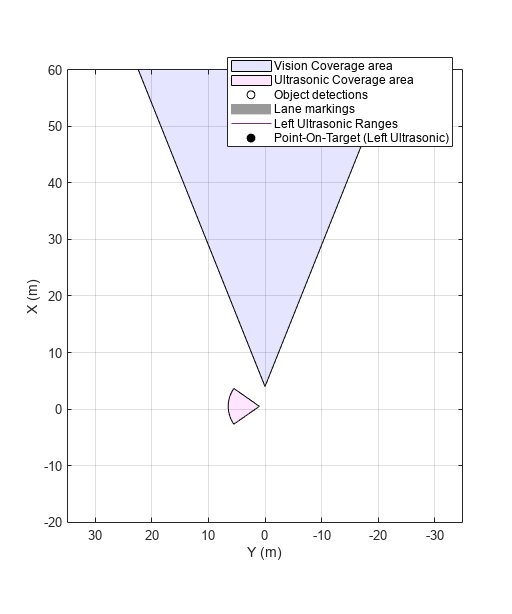
Create a bird's-eye-plot to visualize the driving scenario.
figHandle=figure(Name="BEP",Visible="on"); [detPlotter,lmPlotter,olPlotter,lulrdPlotter,luldetPlotter] = helperCreateBEP(visionSensor,leftUltrasonic,figHandle);
Add Sensors and Simulate Driving Scenario
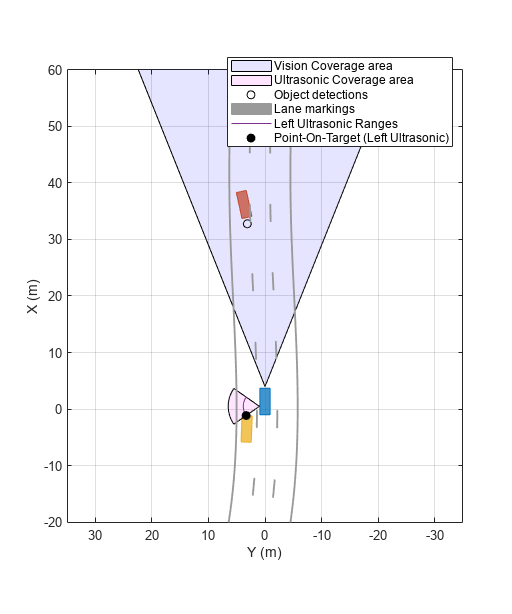
Add both vision and ultrasonic sensors to the driving scenario using the addSensors function. You can add sensors to any vehicle in the driving scenario using the addSensors function by specifying the actor ID of the desired vehicle. In this example, specify the ego-vehicle actor ID.
addSensors(scenario,{visionSensor,leftUltrasonic},egovehicle.ActorID);Simulate the driving scenario. Note that you get separate target poses based on individual sensors by specifying their respective sensor IDs as inputs to the targetPoses function. This syntax returns the ground-truth poses of targets only within the range of the specified sensor. You then pass the ground-truth poses to their respective sensor models to generate detections and visualize them.
while advance(scenario) % Plot scenario lane markings and vehicle outlines at current timestep [lmv,lmf] = laneMarkingVertices(egovehicle); plotLaneMarking(lmPlotter,lmv,lmf) [objposition,objyaw,objlength,objwidth,objoriginOffset,color] = targetOutlines(egovehicle); plotOutline(olPlotter,objposition,objyaw,objlength,objwidth, ... OriginOffset=objoriginOffset,Color=color) % Get ground-truth poses of targets in the range of vision and ultrasonic sensors separately tgtposeVision = targetPoses(scenario,visionSensor.SensorIndex); tgtposeUltrasonic = targetPoses(scenario,leftUltrasonic.SensorIndex); % Obtain detections based on targets only in range [obdets,obValid] = visionSensor(tgtposeVision,scenario.SimulationTime); [lobdets,lobValid] = leftUltrasonic(tgtposeUltrasonic,scenario.SimulationTime); helperPlotBEPVision(obdets,obValid,detPlotter) helperPlotBEPUltrasonic(lobdets,lobValid,leftUltrasonic,lulrdPlotter,luldetPlotter) end
Helper Functions
helperCreateDrivingScenario creates a driving scenario by specifying the road and vehicle properties.
function [scenario, egovehicle] = helperCreateDrivingScenario scenario = drivingScenario; roadCenters = [-120 30 0;-60 0 0;0 0 0; 60 0 0; 120 30 0; 180 60 0]; lspc = lanespec(3); road(scenario,roadCenters,Lanes=lspc); % Create an ego vehicle that travels in the center lane at a velocity of 30 m/s. egovehicle = vehicle(scenario,ClassID=1); egopath = [1.5 0 0; 60 0 0; 111 25 0]; egospeed = 30; smoothTrajectory(egovehicle,egopath,egospeed); % Add a target vehicle that travels ahead of the ego vehicle at 30.5 m/s in the right lane, and changes lanes close to the ego vehicle. ftargetcar = vehicle(scenario,ClassID=1); ftargetpath = [8 2; 60 -3.2; 120 33]; ftargetspeed = 40; smoothTrajectory(ftargetcar,ftargetpath,ftargetspeed); % Add a second target vehicle that travels in the left lane at 32m/s. ltargetcar = vehicle(scenario,ClassID=1); ltargetpath = [-5.0 3.5 0; 60 3.5 0; 111 28.5 0]; ltargetspeed = 30; smoothTrajectory(ltargetcar,ltargetpath,ltargetspeed); end
helperCreateBEP creates a bird's-eye-plot for visualizing the driving scenario simulation.
function [detPlotter, lmPlotter, olPlotter, lulrdPlotter,luldetPlotter] = helperCreateBEP(visionSensor,leftUltrasonic,Figure) screenSize = double(get(groot,'ScreenSize')); Figure.Position = [screenSize(3)*0.17 screenSize(4)*0.15 screenSize(3)*0.4 screenSize(4)*0.6]; clf(Figure); bepAxes = axes(Figure); grid(bepAxes,'on'); bep = birdsEyePlot(Parent=bepAxes,XLim=[-20 60],YLim=[-35 35]); caPlotterV = coverageAreaPlotter(bep,DisplayName="Vision Coverage area",FaceColor="b"); caPlotterU = coverageAreaPlotter(bep,DisplayName="Ultrasonic Coverage area",FaceColor="m"); detPlotter = detectionPlotter(bep,DisplayName="Object detections"); lmPlotter = laneMarkingPlotter(bep,DisplayName="Lane markings"); olPlotter = outlinePlotter(bep); plotCoverageArea(caPlotterV,visionSensor.SensorLocation,... visionSensor.MaxRange,visionSensor.Yaw, ... visionSensor.FieldOfView(1)); plotCoverageArea(caPlotterU,leftUltrasonic.MountingLocation(1:2),... leftUltrasonic.DetectionRange(3),leftUltrasonic.MountingAngles(1), ... leftUltrasonic.FieldOfView(1)); lulrdPlotter = rangeDetectionPlotter(bep,DisplayName="Left Ultrasonic Ranges",LineStyle="-"); luldetPlotter = detectionPlotter(bep,DisplayName="Point-On-Target (Left Ultrasonic)",MarkerFaceColor="k"); end
helperPlotBEPVision plots vision detections on the bird's-eye-plot.
function helperPlotBEPVision(obdets,obValid,detPlotter) if obValid detPos = cellfun(@(d)d.Measurement(1:2),obdets,UniformOutput=false); detPos = vertcat(zeros(0,2),cell2mat(detPos')'); plotDetection(detPlotter,detPos) end end
helperPlotBEPUltrasonic plots ultrasonic range measurements and points on targets.
function helperPlotBEPUltrasonic(lobdets,lobValid,leftUltrasonic,lulrdPlotter,luldetPlotter) if ~isempty(lobdets) && lobValid lranges = lobdets{1}.Measurement; plotRangeDetection(lulrdPlotter,lranges,leftUltrasonic.FieldOfView(1),leftUltrasonic.MountingLocation,leftUltrasonic.MountingAngles) plotDetection(luldetPlotter,lobdets{1}.ObjectAttributes{1}.PointOnTarget(1:2)') end end
Input Arguments
Output Arguments
More About
Version History
Introduced in R2017a