addSensors
Description
addSensors(
adds all the scenario,sensors,hostVehicleID)sensors to the vehicle with unique ID
hostVehicleID, in the driving scenario
scenario.
Examples
In this example, you will add sensors to a driving scenario using the addSensors function and get ground-truth target poses based on the individual sensor inputs. Then, you process the ground-truth target poses into detections and visualize them.
Set Up Driving Scenario and Bird's-Eye-Plot
Create a driving scenario with an ego vehicle and two target vehicles. One target vehicle is in the front and the other is to the left of the ego-vehicle.
[scenario, egovehicle] = helperCreateDrivingScenario;
Configure a vision sensor to be mounted at the front of the ego vehicle.
visionSensor = visionDetectionGenerator(SensorIndex=1,SensorLocation=[4.0 0],Height=1.1,Pitch=1.0,DetectorOutput="Objects only");Configure an ultrasonic sensor to be mounted at the left side of the ego-vehicle.
leftUltrasonic = ultrasonicDetectionGenerator(SensorIndex=2,MountingLocation=[0.5 1 0.2],MountingAngles=[90 0 0],FieldOfView=[70 35],UpdateRate=100);
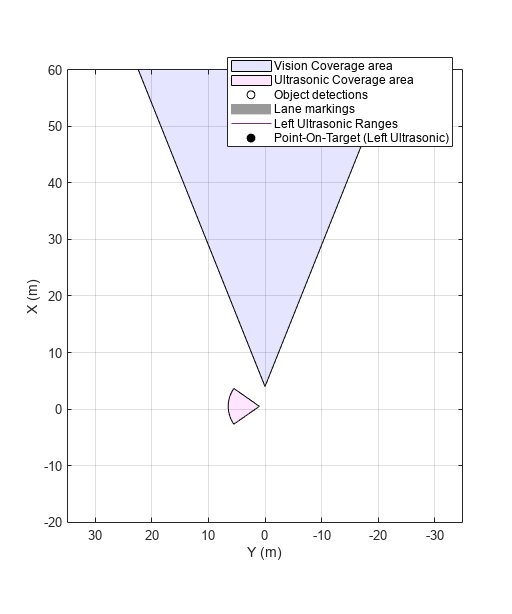
Create a bird's-eye-plot to visualize the driving scenario.
figHandle=figure(Name="BEP",Visible="on"); [detPlotter,lmPlotter,olPlotter,lulrdPlotter,luldetPlotter] = helperCreateBEP(visionSensor,leftUltrasonic,figHandle);
Add Sensors and Simulate Driving Scenario
Add both vision and ultrasonic sensors to the driving scenario using the addSensors function. You can add sensors to any vehicle in the driving scenario using the addSensors function by specifying the actor ID of the desired vehicle. In this example, specify the ego-vehicle actor ID.
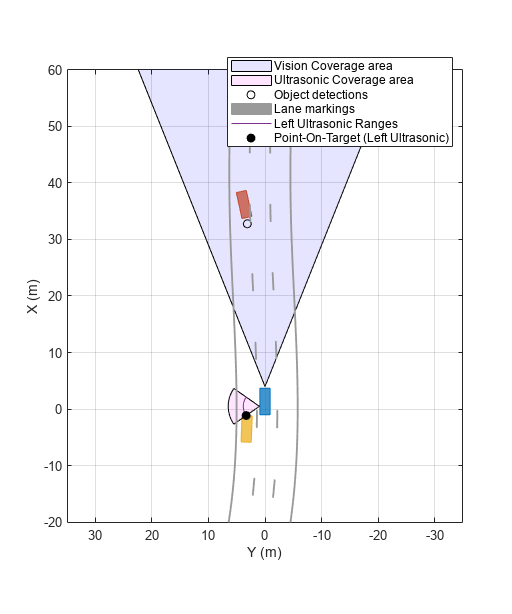
addSensors(scenario,{visionSensor,leftUltrasonic},egovehicle.ActorID);Simulate the driving scenario. Note that you get separate target poses based on individual sensors by specifying their respective sensor IDs as inputs to the targetPoses function. This syntax returns the ground-truth poses of targets only within the range of the specified sensor. You then pass the ground-truth poses to their respective sensor models to generate detections and visualize them.
while advance(scenario) % Plot scenario lane markings and vehicle outlines at current timestep [lmv,lmf] = laneMarkingVertices(egovehicle); plotLaneMarking(lmPlotter,lmv,lmf) [objposition,objyaw,objlength,objwidth,objoriginOffset,color] = targetOutlines(egovehicle); plotOutline(olPlotter,objposition,objyaw,objlength,objwidth, ... OriginOffset=objoriginOffset,Color=color) % Get ground-truth poses of targets in the range of vision and ultrasonic sensors separately tgtposeVision = targetPoses(scenario,visionSensor.SensorIndex); tgtposeUltrasonic = targetPoses(scenario,leftUltrasonic.SensorIndex); % Obtain detections based on targets only in range [obdets,obValid] = visionSensor(tgtposeVision,scenario.SimulationTime); [lobdets,lobValid] = leftUltrasonic(tgtposeUltrasonic,scenario.SimulationTime); helperPlotBEPVision(obdets,obValid,detPlotter) helperPlotBEPUltrasonic(lobdets,lobValid,leftUltrasonic,lulrdPlotter,luldetPlotter) end
Helper Functions
helperCreateDrivingScenario creates a driving scenario by specifying the road and vehicle properties.
function [scenario, egovehicle] = helperCreateDrivingScenario scenario = drivingScenario; roadCenters = [-120 30 0;-60 0 0;0 0 0; 60 0 0; 120 30 0; 180 60 0]; lspc = lanespec(3); road(scenario,roadCenters,Lanes=lspc); % Create an ego vehicle that travels in the center lane at a velocity of 30 m/s. egovehicle = vehicle(scenario,ClassID=1); egopath = [1.5 0 0; 60 0 0; 111 25 0]; egospeed = 30; smoothTrajectory(egovehicle,egopath,egospeed); % Add a target vehicle that travels ahead of the ego vehicle at 30.5 m/s in the right lane, and changes lanes close to the ego vehicle. ftargetcar = vehicle(scenario,ClassID=1); ftargetpath = [8 2; 60 -3.2; 120 33]; ftargetspeed = 40; smoothTrajectory(ftargetcar,ftargetpath,ftargetspeed); % Add a second target vehicle that travels in the left lane at 32m/s. ltargetcar = vehicle(scenario,ClassID=1); ltargetpath = [-5.0 3.5 0; 60 3.5 0; 111 28.5 0]; ltargetspeed = 30; smoothTrajectory(ltargetcar,ltargetpath,ltargetspeed); end
helperCreateBEP creates a bird's-eye-plot for visualizing the driving scenario simulation.
function [detPlotter, lmPlotter, olPlotter, lulrdPlotter,luldetPlotter] = helperCreateBEP(visionSensor,leftUltrasonic,Figure) screenSize = double(get(groot,'ScreenSize')); Figure.Position = [screenSize(3)*0.17 screenSize(4)*0.15 screenSize(3)*0.4 screenSize(4)*0.6]; clf(Figure); bepAxes = axes(Figure); grid(bepAxes,'on'); bep = birdsEyePlot(Parent=bepAxes,XLim=[-20 60],YLim=[-35 35]); caPlotterV = coverageAreaPlotter(bep,DisplayName="Vision Coverage area",FaceColor="b"); caPlotterU = coverageAreaPlotter(bep,DisplayName="Ultrasonic Coverage area",FaceColor="m"); detPlotter = detectionPlotter(bep,DisplayName="Object detections"); lmPlotter = laneMarkingPlotter(bep,DisplayName="Lane markings"); olPlotter = outlinePlotter(bep); plotCoverageArea(caPlotterV,visionSensor.SensorLocation,... visionSensor.MaxRange,visionSensor.Yaw, ... visionSensor.FieldOfView(1)); plotCoverageArea(caPlotterU,leftUltrasonic.MountingLocation(1:2),... leftUltrasonic.DetectionRange(3),leftUltrasonic.MountingAngles(1), ... leftUltrasonic.FieldOfView(1)); lulrdPlotter = rangeDetectionPlotter(bep,DisplayName="Left Ultrasonic Ranges",LineStyle="-"); luldetPlotter = detectionPlotter(bep,DisplayName="Point-On-Target (Left Ultrasonic)",MarkerFaceColor="k"); end
helperPlotBEPVision plots vision detections on the bird's-eye-plot.
function helperPlotBEPVision(obdets,obValid,detPlotter) if obValid detPos = cellfun(@(d)d.Measurement(1:2),obdets,UniformOutput=false); detPos = vertcat(zeros(0,2),cell2mat(detPos')'); plotDetection(detPlotter,detPos) end end
helperPlotBEPUltrasonic plots ultrasonic range measurements and points on targets.
function helperPlotBEPUltrasonic(lobdets,lobValid,leftUltrasonic,lulrdPlotter,luldetPlotter) if ~isempty(lobdets) && lobValid lranges = lobdets{1}.Measurement; plotRangeDetection(lulrdPlotter,lranges,leftUltrasonic.FieldOfView(1),leftUltrasonic.MountingLocation,leftUltrasonic.MountingAngles) plotDetection(luldetPlotter,lobdets{1}.ObjectAttributes{1}.PointOnTarget(1:2)') end end
In this example, you add sensors to a driving scenario using the addSensors function. Then, you obtain sensor measurements without providing any ground-truth actor pose inputs and visualize them.
Set Up Driving Scenario and Bird's-Eye-Plot
Create a driving scenario with an ego vehicle and two target vehicles. One target vehicle is in the front and the other is to the left of the ego-vehicle.
[scenario, egovehicle] = helperCreateDrivingScenario;
Configure a lidar sensor to be mounted at the center of the roof's front edge of the ego vehicle.
lidarSensor = lidarPointCloudGenerator(SensorIndex=1,SensorLocation=[1.5 0],ActorProfiles=actorProfiles(scenario));
Create a bird's-eye-plot to visualize the driving scenario.
[pcPlotter, lmPlotter, olPlotter, bepAxes] = helperCreateBEP;

Add Sensors and Simulate Driving Scenario
Add the lidar sensor to the driving scenario using the addSensors function. You can add sensors to any vehicle in the driving scenario using the addSensors function by specifying the actor ID of the desired vehicle. For this example, specify the ego-vehicle actor ID.
addSensors(scenario,lidarSensor,egovehicle.ActorID);
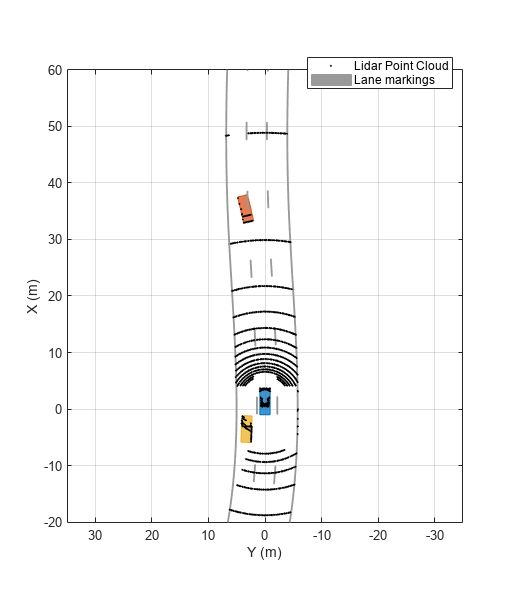
Simulate the driving scenario. Note that you are not providing any ground-truth actor pose inputs when you call lidarSensor object. The sensor automatically returns the point cloud based on the sensor parameters and actors within the sensor range.
legend(bepAxes,'show') lookaheadDistance = 0:0.5:60; while advance(scenario) lb = laneBoundaries(egovehicle,'XDistance',lookaheadDistance,'LocationType','inner'); [lmv,lmf] = laneMarkingVertices(egovehicle); % Obtain lidar point cloud without any actor pose inputs [ptCloud,isValidTime] = lidarSensor(); if isValidTime % Plot point cloud, vehicle outlines and lane markings plotPointCloud(pcPlotter,ptCloud); [objposition,objyaw,objlength,objwidth,objoriginOffset,color] = targetOutlines(egovehicle); plotOutline(olPlotter,objposition,objyaw,objlength,objwidth, ... OriginOffset=objoriginOffset,Color=color) plotLaneMarking(lmPlotter,lmv,lmf) end end
Helper Functions
helperCreateDrivingScenario creates a driving scenario by specifying the road and vehicle properties.
function [scenario, egovehicle] = helperCreateDrivingScenario scenario = drivingScenario; roadCenters = [-120 30 0;-60 0 0;0 0 0; 60 0 0; 120 30 0; 180 60 0]; lspc = lanespec(3); road(scenario,roadCenters,Lanes=lspc); % Create an ego vehicle that travels in the center lane at a velocity of 30 m/s. egovehicle = vehicle(scenario,ClassID=1,Mesh=driving.scenario.carMesh); egopath = [1.5 0 0; 60 0 0; 111 25 0]; egospeed = 30; smoothTrajectory(egovehicle,egopath,egospeed); % Add a target vehicle that travels ahead of the ego vehicle at 30.5 m/s in the right lane, and changes lanes close to the ego vehicle. ftargetcar = vehicle(scenario,ClassID=1,Mesh=driving.scenario.carMesh); ftargetpath = [8 2; 60 -3.2; 120 33]; ftargetspeed = 40; smoothTrajectory(ftargetcar,ftargetpath,ftargetspeed); % Add a second target vehicle that travels in the left lane at 32m/s. ltargetcar = vehicle(scenario,ClassID=1,Mesh=driving.scenario.truckMesh); ltargetpath = [-5.0 3.5 0; 60 3.5 0; 111 28.5 0]; ltargetspeed = 30; smoothTrajectory(ltargetcar,ltargetpath,ltargetspeed); end
helperCreateBEP creates a bird's-eye-plot for visualing the driving scenario simulation.
function [pcPlotter, lmPlotter, olPlotter,bepAxes] = helperCreateBEP() figureName = "BEP"; Figure = findobj('Type','Figure',Name=figureName); if isempty(Figure) screenSize = double(get(groot,'ScreenSize')); Figure = figure(Name=figureName); Figure.Position = [screenSize(3)*0.17 screenSize(4)*0.15 screenSize(3)*0.4 screenSize(4)*0.6]; Figure.NumberTitle = 'off'; Figure.MenuBar = 'none'; Figure.ToolBar = 'none'; end clf(Figure); bepAxes = axes(Figure); grid(bepAxes,'on'); legend(bepAxes,'hide'); bep = birdsEyePlot(Parent=bepAxes,XLim=[-20 60],YLim=[-35 35]); pcPlotter = pointCloudPlotter(bep,DisplayName='Lidar Point Cloud'); lmPlotter = laneMarkingPlotter(bep,DisplayName="Lane markings"); olPlotter = outlinePlotter(bep); end
Input Arguments
Version History
Introduced in R2023a