lidarPointCloudGenerator
Generate lidar point cloud data for driving scenario or RoadRunner Scenario using ray tracing
Description
The lidarPointCloudGenerator
System object™ generates detections from a lidar sensor mounted on an ego vehicle. All
detections are referenced to the coordinate system of the ego vehicle or the vehicle-mounted
sensor. You can use the lidarPointCloudGenerator object in a
scenario containing actors and trajectories, which you can create by using a drivingScenario object. You can use the addSensors
object function of the drivingScenario object to register the lidar as a
sensor with the driving scenario. Then, you can call the lidar sensor object without any input
arguments during the simulation. For more information, see Syntax Description For No
Actor Pose Inputs.
You can also use the lidarPointCloudGenerator object with vehicle actors in RoadRunner Scenario simulation. First you must create a SensorSimulation object to interface sensors with RoadRunner Scenario, and then register the sensor model using the addSensors object function before simulation.
The lidar sensor model created with lidarPointCloudGenerator uses hardware accelerated ray tracing to produce a highly realistic and accurate representation of objects in the point cloud. Ray tracing allows for precise modeling of the interactions between light rays emitted by the lidar sensor and the surfaces of objects in the scene. Additionally, ray tracing considers factors such as surface texture and angles, which enhances the realism and accuracy of the output point cloud data. The sensor model can also add random noise to the detections.
To generate lidar point clouds:
Create the
lidarPointCloudGeneratorobject and set its properties.Call the object with or without arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
lidar = lidarPointCloudGeneratorlidarPointCloudGenerator object with default property
values to generate a point cloud for a lidar sensor.
lidar = lidarPointCloudGenerator(Name,Value)lidarPointCloudGenerator('DetectionCoordinates','Sensor
Cartesian','MaxRange',200) creates a lidar point cloud generator that reports
detections in the sensor Cartesian coordinate system and has a maximum detection range of
200 meters. Enclose each property name in quotes.
Properties
Usage
Syntax
Description
No Actor Pose Inputs
[
generates a lidar point cloud, ptCloud,isValidTime] = lidar()ptCloud and returns
isValidTime, which indicates whether the point cloud is generated
at the current simulation time without any input arguments. Use this syntax after you
add the sensors to the driving scenario using the addSensors
function. This syntax provides significant performance improvements over syntaxes with
input arguments. For more information on performance improvements, see Improved Simulation
Performance Using New Syntax Without Actor Pose Inputs.
[
additionally returns ptCloud,isValidTime,clusters] = lidar()clusters, which contains the classification
data of the generated point cloud.
Manually Input Actor Poses
[
additionally returns ptCloud,isValidTime] = lidar(actors,rdMesh,simTime)isValidTime, which indicates whether the point
cloud is generated at the specified simulation time.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Generate lidar point cloud data for a driving scenario with multiple actors by using the lidarPointCloudGenerator System object. Create the driving scenario by using drivingScenario object. It contains an ego-vehicle, pedestrian and two other vehicles.
Create and plot a driving scenario with multiple vehicles
Create a driving scenario.
scenario = drivingScenario;
Add a straight road to the driving scenario. The road has one lane in each direction.
roadCenters = [0 0 0; 70 0 0];
laneSpecification = lanespec([1 1]);
road(scenario,roadCenters,'Lanes',laneSpecification);Add an ego vehicle to the driving scenario.
egoVehicle = vehicle(scenario,'ClassID',1,'Mesh',driving.scenario.carMesh); waypoints = [1 -2 0; 35 -2 0]; smoothTrajectory(egoVehicle,waypoints,10);
Add a truck, pedestrian, and bicycle to the driving scenario and plot the scenario.
truck = vehicle(scenario,'ClassID',2,'Length', 8.2,'Width',2.5,'Height',3.5, ... 'Mesh',driving.scenario.truckMesh); waypoints = [70 1.7 0; 20 1.9 0]; smoothTrajectory(truck,waypoints,15); pedestrian = actor(scenario,'ClassID',4,'Length',0.24,'Width',0.45,'Height',1.7, ... 'Mesh',driving.scenario.pedestrianMesh); waypoints = [23 -4 0; 10.4 -4 0]; smoothTrajectory(pedestrian,waypoints,1.5); bicycle = actor(scenario,'ClassID',3,'Length',1.7,'Width',0.45,'Height',1.7, ... 'Mesh',driving.scenario.bicycleMesh); waypoints = [12.7 -3.3 0; 49.3 -3.3 0]; smoothTrajectory(bicycle,waypoints,5); plot(scenario,'Meshes','on')
Generate and plot lidar point cloud data
Create a lidarPointCloudGenerator System object.
lidar = lidarPointCloudGenerator;
Add actor profiles and the ego vehicle actor ID from the driving scenario to the System object.
lidar.ActorProfiles = actorProfiles(scenario); lidar.EgoVehicleActorID = egoVehicle.ActorID;
Plot the point cloud data.
bep = birdsEyePlot('Xlimits',[0 70],'YLimits',[-30 30]); plotter = pointCloudPlotter(bep); legend('off'); while advance(scenario) tgts = targetPoses(egoVehicle); rdmesh = roadMesh(egoVehicle); [ptCloud,isValidTime] = lidar(tgts,rdmesh,scenario.SimulationTime); if isValidTime plotPointCloud(plotter,ptCloud); end end


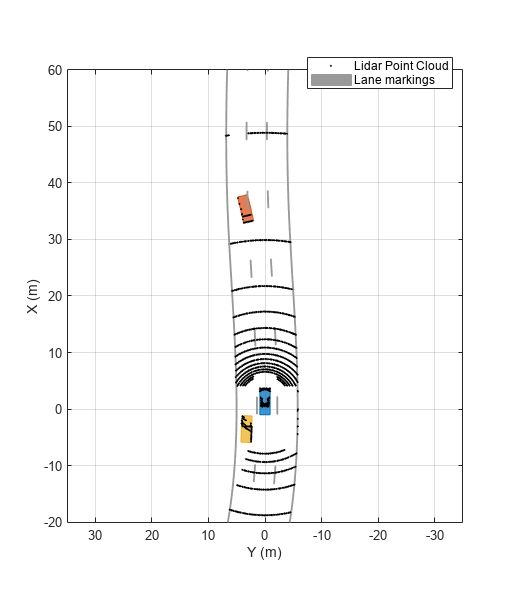
In this example, you add sensors to a driving scenario using the addSensors function. Then, you obtain sensor measurements without providing any ground-truth actor pose inputs and visualize them.
Set Up Driving Scenario and Bird's-Eye-Plot
Create a driving scenario with an ego vehicle and two target vehicles. One target vehicle is in the front and the other is to the left of the ego-vehicle.
[scenario, egovehicle] = helperCreateDrivingScenario;
Configure a lidar sensor to be mounted at the center of the roof's front edge of the ego vehicle.
lidarSensor = lidarPointCloudGenerator(SensorIndex=1,SensorLocation=[1.5 0],ActorProfiles=actorProfiles(scenario));
Create a bird's-eye-plot to visualize the driving scenario.
[pcPlotter, lmPlotter, olPlotter, bepAxes] = helperCreateBEP;

Add Sensors and Simulate Driving Scenario
Add the lidar sensor to the driving scenario using the addSensors function. You can add sensors to any vehicle in the driving scenario using the addSensors function by specifying the actor ID of the desired vehicle. For this example, specify the ego-vehicle actor ID.
addSensors(scenario,lidarSensor,egovehicle.ActorID);
Simulate the driving scenario. Note that you are not providing any ground-truth actor pose inputs when you call lidarSensor object. The sensor automatically returns the point cloud based on the sensor parameters and actors within the sensor range.
legend(bepAxes,'show') lookaheadDistance = 0:0.5:60; while advance(scenario) lb = laneBoundaries(egovehicle,'XDistance',lookaheadDistance,'LocationType','inner'); [lmv,lmf] = laneMarkingVertices(egovehicle); % Obtain lidar point cloud without any actor pose inputs [ptCloud,isValidTime] = lidarSensor(); if isValidTime % Plot point cloud, vehicle outlines and lane markings plotPointCloud(pcPlotter,ptCloud); [objposition,objyaw,objlength,objwidth,objoriginOffset,color] = targetOutlines(egovehicle); plotOutline(olPlotter,objposition,objyaw,objlength,objwidth, ... OriginOffset=objoriginOffset,Color=color) plotLaneMarking(lmPlotter,lmv,lmf) end end
Helper Functions
helperCreateDrivingScenario creates a driving scenario by specifying the road and vehicle properties.
function [scenario, egovehicle] = helperCreateDrivingScenario scenario = drivingScenario; roadCenters = [-120 30 0;-60 0 0;0 0 0; 60 0 0; 120 30 0; 180 60 0]; lspc = lanespec(3); road(scenario,roadCenters,Lanes=lspc); % Create an ego vehicle that travels in the center lane at a velocity of 30 m/s. egovehicle = vehicle(scenario,ClassID=1,Mesh=driving.scenario.carMesh); egopath = [1.5 0 0; 60 0 0; 111 25 0]; egospeed = 30; smoothTrajectory(egovehicle,egopath,egospeed); % Add a target vehicle that travels ahead of the ego vehicle at 30.5 m/s in the right lane, and changes lanes close to the ego vehicle. ftargetcar = vehicle(scenario,ClassID=1,Mesh=driving.scenario.carMesh); ftargetpath = [8 2; 60 -3.2; 120 33]; ftargetspeed = 40; smoothTrajectory(ftargetcar,ftargetpath,ftargetspeed); % Add a second target vehicle that travels in the left lane at 32m/s. ltargetcar = vehicle(scenario,ClassID=1,Mesh=driving.scenario.truckMesh); ltargetpath = [-5.0 3.5 0; 60 3.5 0; 111 28.5 0]; ltargetspeed = 30; smoothTrajectory(ltargetcar,ltargetpath,ltargetspeed); end
helperCreateBEP creates a bird's-eye-plot for visualing the driving scenario simulation.
function [pcPlotter, lmPlotter, olPlotter,bepAxes] = helperCreateBEP() figureName = "BEP"; Figure = findobj('Type','Figure',Name=figureName); if isempty(Figure) screenSize = double(get(groot,'ScreenSize')); Figure = figure(Name=figureName); Figure.Position = [screenSize(3)*0.17 screenSize(4)*0.15 screenSize(3)*0.4 screenSize(4)*0.6]; Figure.NumberTitle = 'off'; Figure.MenuBar = 'none'; Figure.ToolBar = 'none'; end clf(Figure); bepAxes = axes(Figure); grid(bepAxes,'on'); legend(bepAxes,'hide'); bep = birdsEyePlot(Parent=bepAxes,XLim=[-20 60],YLim=[-35 35]); pcPlotter = pointCloudPlotter(bep,DisplayName='Lidar Point Cloud'); lmPlotter = laneMarkingPlotter(bep,DisplayName="Lane markings"); olPlotter = outlinePlotter(bep); end
Version History
Introduced in R2020aSee Also
Objects
objectDetection|drivingScenario|laneMarking|lanespec|monoCamera|multiObjectTracker|drivingRadarDataGenerator|visionDetectionGenerator|extendedObjectMesh|insSensor