drivingRadarDataGenerator
Generate radar sensor detections or track reports from driving scenario or RoadRunner Scenario
Description
The drivingRadarDataGenerator
System object™ generates detections or track reports of targets from an automotive radar sensor
model. Use this object to generate sensor data from a driving scenario containing actors and
trajectories, which you can create by using a drivingScenario object. When creating scenarios using the Driving Scenario
Designer app, the radar sensors mounted on the ego vehicle are output as
drivingRadarDataGenerator objects.
The drivingRadarDataGenerator object can simulate clustered or unclustered detections
with added random noise and also generate false alarm detections. You can fuse the generated
detections with other sensor data and track objects using a multiObjectTracker object. You can also output tracks directly from the
drivingRadarDataGenerator object. To configure whether targets are output as clustered
detections, unclustered detections, or tracks, use the TargetReportFormat property.
You can also use the drivingRadarDataGenerator object with vehicle actors in RoadRunner Scenario simulation. First you must create a SensorSimulation object to interface sensors with RoadRunner Scenario, and then register the sensor model using the addSensors object function before simulation.
To generate radar detection or track reports:
Create the
drivingRadarDataGeneratorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
rdr = drivingRadarDataGenerator
rdr = drivingRadarDataGenerator(id)SensorIndex property to id.
rdr = drivingRadarDataGenerator(___,Name,Value)drivingRadarDataGenerator('TargetReportFormat','Tracks','FilterInitializationFcn',@initcvkf)
creates a radar sensor that generates track reports by using a tracker that is initialized
by a constant-velocity linear Kalman filter.
Properties
Usage
Syntax
Description
Generate Detections
These syntaxes apply when you set the TargetReportFormat property to 'Clustered detections' or
'Detections'.
[
also returns the number of valid detections reported,
dets,numReports] = rdr(targets,simTime)numReports.
[
also returns a logical value, dets,numReports,isValidTime] = rdr(targets,simTime)isValidTime, indicating whether
simTime is a valid time for generating detections. If
simTime is an integer multiple of the reciprocal of the UpdateRate property value, then isValidTime is
1 (true).
Generate Tracks
These syntaxes apply when you set the TargetReportFormat property to 'Tracks'.
[
also returns the number of valid tracks reported,
tracks,numReports] = rdr(targets,simTime)numReports.
[
also returns a logical value, tracks,numReports,isValidTime] = rdr(targets,simTime)isValidTime, indicating whether
simTime is a valid time for generating tracks. If
simTime is an integer multiple of the reciprocal of the UpdateRate property value, then isValidTime is
1 (true).
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Use a radar sensor to generate clustered detections, unclustered detections, and tracks of multiple vehicles in a driving scenario.
Create Driving Scenario
Create an empty driving scenario and add a two-lane, 100-meter road segment. Separate the lanes by using dashed lane markings.
scenario = drivingScenario('SampleTime',0.02); roadCenters = [0 0 0; 100 0 0]; marking = [laneMarking('Solid') laneMarking('Dashed') laneMarking('Solid')]; laneSpecification = lanespec([1 1],'Marking',marking); road(scenario,roadCenters,'Lanes',laneSpecification);
Add the ego vehicle. The vehicle travels 90 meters in the right lane at a constant speed of 20 meters per second.
ego = vehicle(scenario,'ClassID',1,'Position',[5 -1.8 0]); egoWaypoints = [ego.Position; ... (ego.Position(1) + 90) ego.Position(2:3)]; egoSpeed = 20; % m/s smoothTrajectory(ego,egoWaypoints,egoSpeed)
Add the target vehicles that the radar can generate detections and tracks from.
The first vehicle is a car that starts 10 meters in front of the ego vehicle and travels along the lane at a constant speed of 30 meters per second.
The second vehicle is a truck that travels in the left lane at a constant speed of 30 meters per second.
car = vehicle(scenario,'ClassID',1,'Position',[ego.Position(1)+10 -1.8 0]); carWaypoints = [car.Position; ... (car.Position(1) + 75) car.Position(2:3)]; carSpeed = 30; % m/s smoothTrajectory(car,carWaypoints,carSpeed) truck = vehicle(scenario,'ClassID',2,'Position',[5 1.8 0], ... 'Length',8.2,'Width',2.5,'Height',3.5); truckWaypoints = [truck.Position; ... (truck.Position(1) + 90) truck.Position(2:3)]; truckSpeed = 30; % m/s smoothTrajectory(truck,truckWaypoints,truckSpeed)
Plot the driving scenario and pause to allow time for the plot to update.
plot(scenario) while advance(scenario) pause(scenario.SampleTime) end

Create Radar Sensor
Create a radar sensor with a maximum range of 100 meters and mount it to the front mirror of the ego vehicle. Configure the sensor to update at the same rate as the sample time of the scenario. Specify for the radar to use the target profiles of the car and truck for generating data.
close(gcf) maxRange = 100; % m frontMirror = [ego.FrontOverhang 0 (ego.Height-0.1)]; profiles = actorProfiles(scenario); targetProfiles = profiles(2:end); id = 1; rdr = drivingRadarDataGenerator(id,'UpdateRate',1/scenario.SampleTime, ... 'MountingLocation',frontMirror, ... 'RangeLimits',[0 maxRange], ... 'Profiles',targetProfiles)
rdr =
drivingRadarDataGenerator with properties:
SensorIndex: 1
UpdateRate: 50
MountingLocation: [0.9000 0 1.3000]
MountingAngles: [0 0 0]
FieldOfView: [20 5]
RangeLimits: [0 100]
RangeRateLimits: [-100 100]
DetectionProbability: 0.9000
FalseAlarmRate: 1.0000e-06
Use get to show all properties
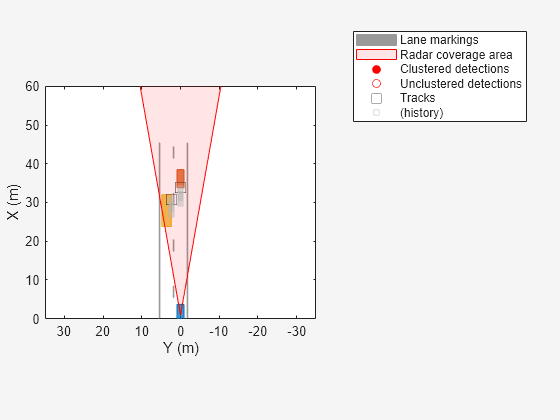
Create Bird's-Eye Plot
Create a bird's-eye plot for visualizing the sensor data. Add plotters for visualizing the lane markings, vehicle outlines, and radar coverage area. Use the helperPlotScenario function to plot these aspects of the scenario. This helper function is defined at the end of the example.
bep = birdsEyePlot('XLim',[0 60],'YLim',[-35 35]); lmPlotter = laneMarkingPlotter(bep,'Tag','lm','DisplayName','Lane markings'); olPlotter = outlinePlotter(bep,'Tag','ol'); caPlotter = coverageAreaPlotter(bep, ... 'Tag','ca', ... 'DisplayName','Radar coverage area', ... 'FaceColor','red','EdgeColor','red'); helperPlotScenario(bep,rdr,ego)

Generate Clustered Detections
Use the radar to generate clustered detections of the target vehicles. Visualize these detections on the bird's-eye plot. At each simulation time step, the radar generates only one detection per target.
clusterDetPlotter = detectionPlotter(bep, ... 'DisplayName','Clustered detections', ... 'MarkerEdgeColor','red', ... 'MarkerFaceColor','red'); restart(scenario) while advance(scenario) simTime = scenario.SimulationTime; targets = targetPoses(ego); [dets,numDets,isValidTime] = rdr(targets,simTime); helperPlotScenario(bep,rdr,ego) if isValidTime && numDets > 0 detPos = cell2mat(cellfun(@(d)d.Measurement(1:2),dets, ... 'UniformOutput',false)')'; plotDetection(clusterDetPlotter,detPos) end end

Generate Unclustered Detections
Use the radar to generate unclustered detections of the target vehicles. Visualize these detections on the bird's-eye plot. At each simulation time step, the radar generates multiple detections per target.
clearData(clusterDetPlotter) release(rdr) rdr.TargetReportFormat = "Detections"; detPlotter = detectionPlotter(bep, ... 'DisplayName','Unclustered detections', ... 'MarkerEdgeColor','red'); restart(scenario) while advance(scenario) simTime = scenario.SimulationTime; targets = targetPoses(ego); [dets,numDets,isValidTime] = rdr(targets,simTime); helperPlotScenario(bep,rdr,ego) if isValidTime && numDets > 0 detPos = cell2mat(cellfun(@(d)d.Measurement(1:2),dets, ... 'UniformOutput',false)')'; plotDetection(detPlotter,detPos) end end

Generate Tracks
Use the radar to generate tracks of the target vehicles. Visualize these tracks and the track history on the bird's-eye plot.
clearData(detPlotter) release(rdr) rdr.TargetReportFormat = "Tracks"; historyDepth = 20; tPlotter = trackPlotter(bep,'DisplayName','Tracks', ... 'HistoryDepth',historyDepth); restart(scenario) while advance(scenario) simTime = scenario.SimulationTime; targets = targetPoses(ego); [tracks,numTracks,isValidTime] = rdr(targets,simTime); helperPlotScenario(bep,rdr,ego) if isValidTime && numTracks > 0 trackPos = cell2mat(arrayfun(@(t)t.State(1:2:end),tracks, ... 'UniformOutput', false)')'; plotTrack(tPlotter,trackPos(:,1:2)) end end
Close the bird's-eye plot, restart the scenario, and release the radar sensor.
close(gcf) restart(scenario) release(rdr)
Supporting Functions
helperPlotScenario plots the lane markings and vehicle outlines of the ego vehicle on the bird's-eye plot. It also plots the coverage area of the radar sensor.
function helperPlotScenario(bep,radar,ego) % Plot lane markings lmPlotter = findPlotter(bep,'Tag','lm'); [lmv,lmf] = laneMarkingVertices(ego); plotLaneMarking(lmPlotter,lmv,lmf) % Plot vehicle outlines olPlotter = findPlotter(bep,'Tag','ol'); [position,yaw,length,width,originOffset,color] = targetOutlines(ego); plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color) % Plot radar coverage area caPlotter = findPlotter(bep,'Tag','ca'); plotCoverageArea(caPlotter,radar.MountingLocation(1:2), ... radar.RangeLimits(2),radar.MountingAngles(1), ... radar.FieldOfView(1)) end
Algorithms
Extended Capabilities
Version History
Introduced in R2021a
See Also
Objects
objectDetection|objectTrack|drivingScenario|multiObjectTracker|visionDetectionGenerator|lidarPointCloudGenerator|insSensor