Driving Scenario Simulation
Simulation using realistic driving scenarios and sensor models is a crucial part of testing automated driving algorithms. Automated Driving Toolbox™ enables you to create driving scenarios with synthetic sensor data. The toolbox provides these simulation environments to test automated driving algorithms. These environments have their uses, and one environment is not a replacement for the other.
In the cuboid simulation environment, vehicles and other actors in the scenario are represented as simple box shapes, or for lidar applications, as polygon meshes. Use this environment to rapidly author scenarios, generate detections using low-fidelity radar and camera sensors, and test controllers and tracking and sensor fusion algorithms in both MATLAB® and Simulink®. To get started authoring a scenario, use the Driving Scenario Designer app.
You can also import road networks from the ASAM OpenDRIVE® file format, edit the imported road networks, and build scenarios. Then, you can export driving scenarios to the ASAM OpenDRIVE and ASAM OpenSCENARIO® formats.
In the Unreal Engine simulation environment, scenarios are rendered using the Unreal Engine from Epic Games®. Use this environment to visualize scenarios using more realistic graphics; to generate high-fidelity radar, camera, and lidar sensor data; and to test perception-in-the-loop systems. This environment is available in Simulink and runs on Windows® only. To learn more, see Unreal Engine Simulation for Automated Driving.
Automated Driving Toolbox provides tools to programmatically manage scenes and scenarios and simulate scenarios in RoadRunner scenario simulation environment with actors modeled in MATLAB and Simulink. To learn more, see RoadRunner Scenario Simulation.
Automated Driving Toolbox also provides these additional support packages for ADAS scenario applications:
Scenario Builder for Automated Driving Toolbox — Generate scenes and scenarios using recorded real-world sensor data from cameras, lidars, and processed track-list data. To learn more, see Scenarios from Real-World Sensor Data.
Automated Driving Toolbox Test Suite for Euro NCAP® Protocols — Generate test specifications, seed scenarios, and scenario variants for automated driving standards like Euro NCAP and evaluate test metrics. To learn more, see Euro NCAP Test Suite.
Automated Driving Toolbox Interface for Eclipse™ SUMO™ Traffic Simulator — Configure cosimulation between Simulink and Eclipse™ SUMO™ traffic simulator, spawn actors, read and write information in SUMO scenario. To learn more, see SUMO Traffic Simulation with RoadRunner Scenario
Highlighted Topics
- Create Driving Scenario Interactively and Generate Synthetic Sensor Data
- Simulate Simple Driving Scenario and Sensor in Unreal Engine Environment
- Import ASAM OpenDRIVE Roads into Driving Scenario
- Export Driving Scenario to ASAM OpenSCENARIO XML File
- Customize Unreal Engine Scenes for Automated Driving
- Read and Write Vehicle Data in SUMO Scenario Using Cosimulation with Simulink
Categories
- Cuboid Scenario Simulation
Test automated driving algorithms using cuboid-based scenarios and detections from radar, camera, and lidar sensor models
- Unreal Engine Scenario Simulation
Develop, test, and visualize the performance of driving algorithms in a simulated environment using the Unreal Engine from Epic Games
- Cosimulate Simulink and Eclipse
SUMO Traffic Simulator
Configure cosimulation between Simulink and Eclipse SUMO traffic simulator, spawn actors, read and write information in SUMO scenario
Featured Examples
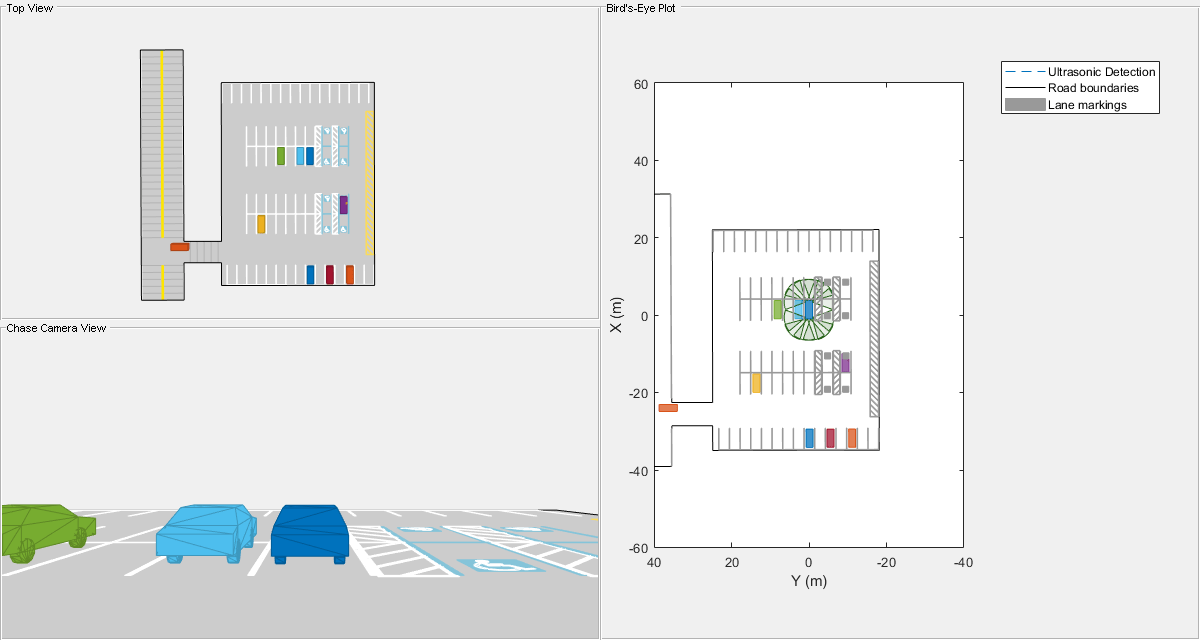
Simulate Vehicle Parking Maneuver in Driving Scenario
Simulate a parking maneuver and generate sensor detections in a large parking lot using a cuboid driving scenario.

Create Actor and Vehicle Trajectories Programmatically
Programmatically create actor and vehicle trajectories for a driving scenario.
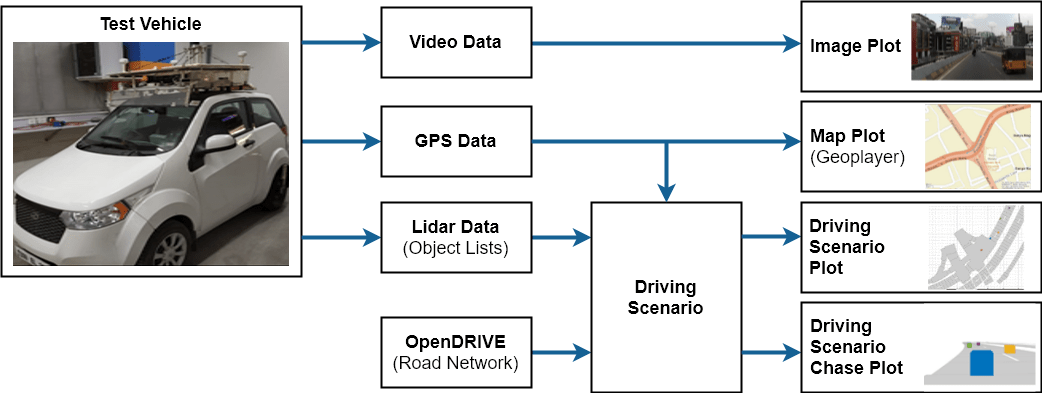
Scenario Generation from Recorded Vehicle Data
Automatically generate virtual driving scenarios from recorded vehicle data.
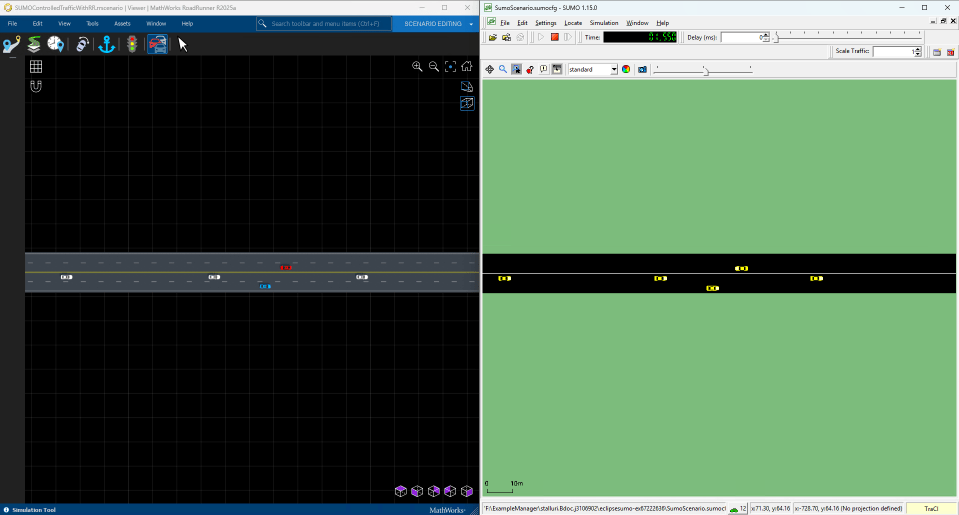
SUMO Traffic Simulation with RoadRunner Scenario
SUMO Traffic Simulation with RoadRunner Scenario.
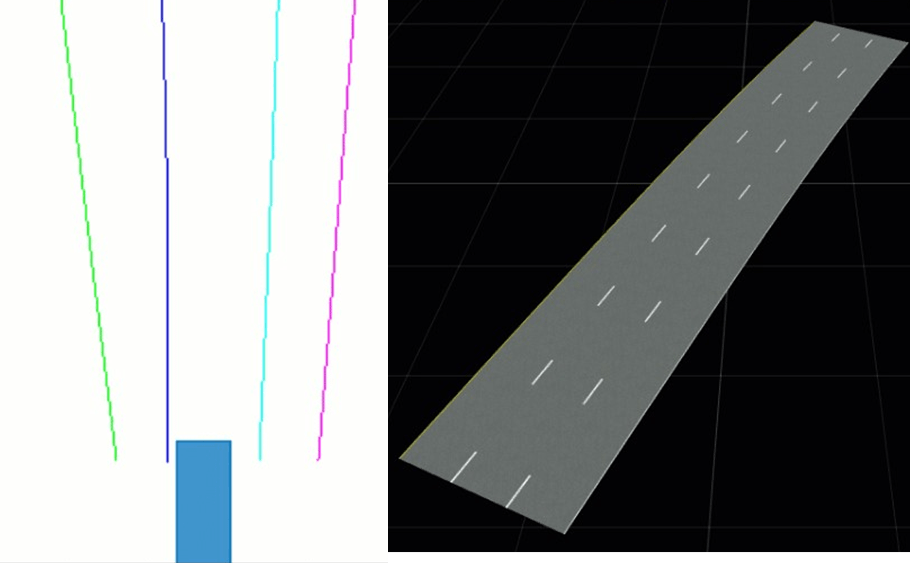
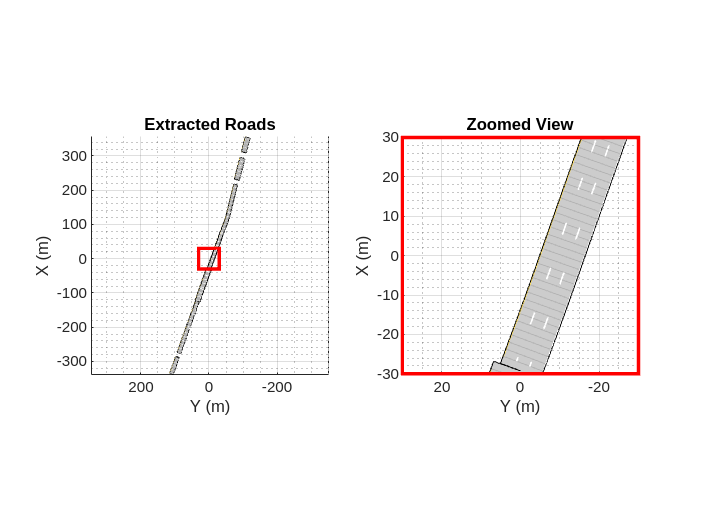
Generate High Definition Scene from Lane Detections and OpenStreetMap
Generate HD road scene using recorded lane detections, GPS data, and OpenStreetMap® data.
Generate Scenario from Actor Track Data and GPS Data
Generate ASAM OpenSCENARIO v1.0 file using recorded actor tracklist and GPS data.

Generate Scenario Variants for Testing AEB Pedestrian Systems
Generate scenario variants to test automated emergency braking (AEB) system using car-to-pedestrian European New Car Assessment Programme (Euro NCAP) test scenario.

Test Closed-Loop ADAS Algorithm Using Driving Scenario
Test closed-loop ADAS algorithms in Simulink by using driving scenarios saved from the Driving Scenario Designer app.

Perception-Based Parking Spot Detection Using Unreal Engine Simulation
Build a bird's-eye-view map of a parking lot using semantically segmented images from the ego vehicle camera, and detect empty parking spots from the map.

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Develop a simultaneous localization and mapping algorithm using synthetic lidar sensor data recorded from the Unreal Engine simulation environment.
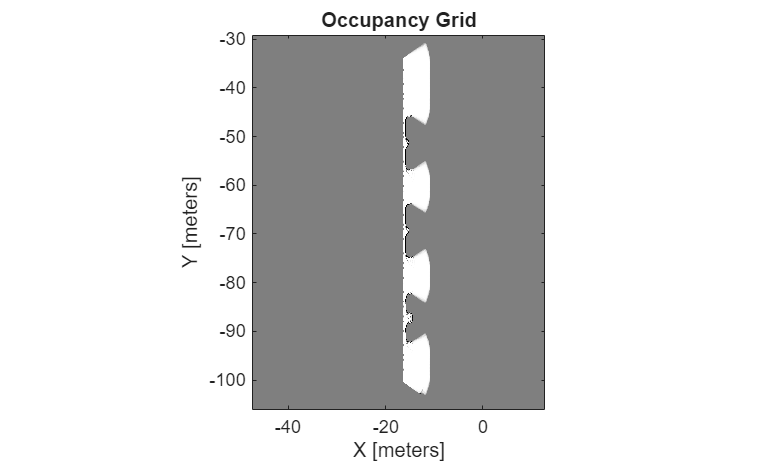
Build Occupancy Map Using Simulation 3D Ultrasonic Sensor
Build an occupancy map of a US city block using a Simulation 3D Ultrasonic Sensor block and Unreal Engine simulation environment.